-
1 управление производственными процессами с помощью обычных компьютеров
Programming: industrial control with conventional computersУниверсальный русско-английский словарь > управление производственными процессами с помощью обычных компьютеров
-
2 управление процессами с помощью ЭВМ
Electrical engineering: computer process controlУниверсальный русско-английский словарь > управление процессами с помощью ЭВМ
-
3 управление процессами с помощью ЭВМ
Универсальный русско-немецкий словарь > управление процессами с помощью ЭВМ
-
4 автоматизированное с помощью ЭВМ производство
автоматизированное с помощью ЭВМ производство
Например, комплексное использование ПЭВМ для управления технологическими и другими процессами в различных видах производств; является естественным продолжением САПР.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > автоматизированное с помощью ЭВМ производство
-
5 управление
управление ж. Amt n; Ansteuern n; Ansteuerung f; рег. Aussteuerung f; Bedienung f; Betriebsführung f; Betätigung f; авто. Fahren n; Führung f; Handhabung f; англ. Handling n; Kontrolle f; Leitung f; Lenkung f; ракет. Steuerung f; Verwaltung f; Vorwärtsregelung fуправление ж. (напр., машиной) Manipulation fуправление ж. ВМ Rechnersteuerung fуправление ж. горным давлением горн. Beeinflussung f des Gebirgsdrucks; Beherrschung f des Gebirgsdruckes; Beherrschung f des Gebirgsdrucks; Gebirgsbeherrschung fуправление ж. кровлей горн. Beeinflussung f des Hangenden; горн. Behandlung f des Hangenden; Beherrschung f des Hangenden; горн. Dachbehandlung f; горн. Hangendbeherrschung fуправление ж. переключениями (тяговых электродвигателей) непосредственно в силовой цепи Starkstromsteuerung fуправление ж. по радио с. Funkfernsteuerung f; ракет. Funklenkung f; Funksteuerung f; Radiolenkung f; drahtlose Steuerung fуправление ж. производственным процессом Betriebsablaufsteuerung f; Produktionssteuerung f; Verfahrensregelung fБольшой русско-немецкий полетехнический словарь > управление
-
6 символизм
Символизм есть форма непрямого, косвенного представления; символизация — уникальный, присущий только человеку психический процесс замещения одних образов другими идеационными образованиями, характеризующимися лишь отдаленным сходством с первичными представлениями — сходством, основанным на случайных, вторичных, малосущественных деталях. В широком смысле понятие символа относятся ко всем видам замены простого словесного выражения наблюдаемых и гипотетических явлений другими, непрямыми способами отражения — математическим, химическим, физическим, фонетическим, речевым и др. В психоанализе принято разграничивать два основных типа символического отражения явлений: 1) сравнительное (в виде знака или признака), когда соотношения между обозначаемым (понятием) и обозначающим средством (звуком, образом) строятся на основе общепринятых в данной культуре правил (соглашения), как это бывает в случае большинства употребляемых слов; 2) в виде символа, имеющего сознательную, "явную" часть, но на самом деле отражающего скрытое, латентное, бессознательное психическое содержание. Во втором случае соотношение между символом и его содержанием основано на общем сходстве либо аналогии. Так, например, образ дома может отражать человеческое тело, вид башни — пенис и т.п. Подобные косвенные и непроизвольные элементы понятия символ лингвистом де Соссюром (1966) обозначены как мотивационные. Именно этот — мотивационный — смысл вкладывал в понятие символа и Фрейд. С его точки зрения, символическое значение выявляется посредством ассоциаций, нередко весьма неопределенных, а потому трудноразличимых.Если знак "...как средство общения связан с торможением разрядки, препятствием на ее пути... то символ при вытеснении либо искажении бессознательного содержания имеет возможность ‘разрядиться' прямым, непосредственным образом" (Beres, 1960, с. 330). Различия между знаком и символом, а также сознательными и бессознательными символическими процессами подробно изучены в работах Пиаже (1962), Вернера и Каплан (1984).Символы могут рассматриваться как некие "заменители" языкового выражения (чисто конвенциональной системы) или же сознательной либо бессознательной организации мышления, проявляющегося в виде свободных ассоциаций. Язык, знаковая система и упорядоченное мышление, напротив, являются подвидами врожденной способности к репрезентации (символизации в широком смысле), с помощью которых они могут реализовываться и сохраняться.Интерес к проблеме символа в психоаналитической теории имеет длительную историю; он восходит к наблюдениям Фрейда, выявившего параллели между представлениями у людей примитивных культур и невротическими симптомами и символическими сновидениями у современников. Все виды символов Фрейд понимал как следствие бессознательных первичных процессов, направленных на снижение уровня тревоги (с помощью вытеснения неприемлемых для индивида желаний и мыслей). Символообразование сдерживает разрядку напряжения, возникающую между побуждениями и возможными реакциями. Символы призваны смещать желания с запретных объектов на объекты-"заменители", обеспечивая тем самым непосредственное удовлетворение. Компромисс, достигаемый частичной экспрессией с помощью символов, служит как индивиду, так и культуре.Фрейд отмечал, что основными объектами символического выражения являются функции тела и его отдельных частей, сексуальность, семья, а также рождение и смерть, что, в частности, подтверждается содержанием конфликтов, симптоматики и проблем пациентов. В более поздних психоаналитических концепциях учитываются также способы самораскрытия Самости (Ricoeur, 1970). Специфическое символообразование в структуре нарушений мышления, расстройств настроения и характера можно интерпретировать как усилия индивида заново обрести утраченные объекты или восстановить утраченную упорядоченность — упорядоченность, достигнутую благодаря способности человека к символизации в широком смысле слова.Ранние убеждения Фрейда относительно универсального, врожденного характера символов и первичных фантазий в настоящее время подвергаются существенному пересмотру. Принято считать, что сходство основных символических образов в различных культурах связано с общностью человеческого опыта как такового, с формами выражения детской любознательности и, наконец, с собственно когнитивными процессами, задействованными в символообразовании. Однако, как отмечал Фрейд (1918), когнитивные процессы не всегда соответствуют схемам, связанным с индивидуальным опытом. В подобных случаях символы могут отражать не только отсутствующие в прошлом опыте индивида события, но и отдельные аспекты "перспективы". Иными словами, подмеченные Фрейдом схемы когнитивных процессов детерминированы не столько прошлым опытом индивида, сколько моделью, состоящей из компонентов как прошлого, так и "будущего" (Smith, 1976).Несмотря на отсутствие прямых связей между символами и образованием ассоциаций, знание и осторожное использование бессознательных характеристик символа может стать важным подспорьем в понимании различных конфликтов пациента. Символизм всегда сочетается с неоднозначностью интерпретаций и поэтому требует учета всех допустимых значений символа, приобретающего конкретное выражение только в общем контексте защитных либо адаптивных процессов. Исходя из общетеоретических положений, определенные аспекты междисциплинарного изучения символизма должны включать в себя проблемы формирования и раннего развития процессов символизации, соотношений между символическими формами выражения состояний сознания, а также степени вовлеченности конфликтных образований в процессы символизации.\Лит.: [71, 106, 249, 289, 296, 326, 686, 722, 726, 756, 784, 796, 858, 871] -
7 автоматизированная система управления
- MIS
- management information system
- computerized control system
- automatized management system
- automatized control system
- automated data management system
- automated controlling system
- automated control system
- automated
- ACS
автоматизированная система, управляющая
АСУ
Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек-оператор.
Примечание
В зависимости от объектов управления различают, например: АСУ П, когда объектом управления является предприятие; АСУ ТП, когда объектом управления является технологический процесс; ОАСУ, когда объектом управления является организационный объект или комплекс.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
автоматизированная система управления
АСУ
Совокупность математических методов, технических средств (компьютеров, средств связи, устройств отображения информации и т. д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом (процессом) в соответствии с заданной целью. АСУ принято делить на основу и функциональную часть. В основу входят информационное, техническое и математическое обеспечение. К функциональной части относят набор взаимосвязанных программ, автоматизирующих конкретные функции управления (планирование, финансово-бухгалтерскую деятельность и др.). Различают АСУ объектами (технологическими процессами - АСУТП, предприятием - АСУП, отраслью - ОАСУ) и функциональными автоматизированными системами, например, проектирования, расчетов, материально-технического и др. обеспечения.
[ http://www.morepc.ru/dict/]
автоматизированная система управления
АСУ
Система управления, в которой применяются современные автоматические средства обработки данных и экономико-математические методы для решения основных задач управления производственно-хозяйственной деятельностью. Это человеко-машинная система: в ней ряд операций и действий передается для исполнения машинам и другим устройствам (особенно это относится к так называемым рутинным, повторяющимся, стандартным операциям расчетов), но главное решение всегда остается за человеком. Этим АСУ отличаются от автоматических систем, т.е. таких технических устройств, которые действуют самостоятельно, по установленной для них программе, без вмешательства человека. АСУ подразделяются прежде всего на два класса: автоматизированные системы организационного управления и автоматизированные системы управления технологическими процессами (последние часто бывают автоматическими, первые ими принципиально быть не могут). Традиционно термин АСУ закрепился за первым из названных классов. Отличие АСУ от обычной, неавтоматизированной, но также использующей ЭВМ, системы управления показано на рис. А.1, а, б. Стрелками обозначены потоки информации. В первом случае компьютер используется для решения отдельных задач управления, например для производства плановых расчетов, результаты которых рассматриваются органом управления и либо принимаются, либо отвергаются. При этом необходимые данные собираются специально для решения каждой задачи и вводятся в компьютер, а потом за ненадобностью уничтожаются. Во втором случае существенная часть информации от объекта управления собирается непосредственно вычислительным центром, в том числе по каналам связи. При этом нет необходимости каждый раз вводить в компьютер все данные: часть из них (цены, нормативы и т. п.) хранится в ее запоминающем устройстве. Из вычислительного центра выработанные задания поступают, с одной стороны, в орган управления, а с другой (обычно через контрольное звено) — к объекту управления. В свою очередь информация, поступающая от объекта управления, влияет на принимаемые решения, т.е. здесь используется кибернетический принцип обратной связи. Это — АСУ. Принято рассматривать каждую АСУ одновременно в двух аспектах: с точки зрения ее функций — того, что и как она делает, и с точки зрения ее схемы, т.е. с помощью каких средств и методов эти функции реализуются. Соответственно АСУ подразделяют на две группы подсистем — функциональные и обеспечивающие. Создание АСУ на действующем экономическом объекте (в фирме, на предприятии, в банке и т.д.) — не разовое мероприятие, а длительный процесс. Отдельные подсистемы АСУ проектируются и вводятся в действие последовательными очередями, в состав функций включаются также все новые и новые задачи; при этом АСУ органически «вписывается» в систему управления. Обычно первые очереди АСУ ограничиваются решением чисто информационных задач. В дальнейшем их функции усложняются, включая использование оптимизационных расчетов, элементов оптимального управления. Степень участия АСУ в процессах управления может быть весьма различной, вплоть до самостоятельной выдачи компьютером, на основе получаемых им данных, оперативных управляющих «команд». Поскольку внедрение АСУ требует приспособления документации для машинной обработки, создаются унифицированные системы документации, а также классификаторы технико-экономической информации и т.д. Экономическая эффективность АСУ определяется прежде всего ростом эффективности самого производства в результате лучшей загрузки оборудования, повышения ритмичности, сокращения незавершенного производства и других материальных запасов, повышения качества продукции. РисА.1. Системы управления с использованием компьютеров а — неавтоматизированная, б — автоматизированная; I — управляющий центр; II — автоматизированная управляемая система (например, производство), III — контроль; тонкая черная стрелка — канал непосредственного управления компьютером некоторыми технологическими процессами (бывает не во всех АСУ); тонкая пунктирная стрелка показывает ту часть информации, которая поступает непосредственно в центр, минуя компьютер.
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > автоматизированная система управления
-
8 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
9 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
10 управление аварийными сигналами
управление аварийными сигналами
-
[Интент]
Переход от аналоговых систем к цифровым привел к широкому, иногда бесконтрольному использованию аварийных сигналов. Текущая программа снижения количества нежелательных аварийных сигналов, контроля, определения приоритетности и адекватного реагирования на такие сигналы будет способствовать надежной и эффективной работе предприятия.Если технология хороша, то, казалось бы, чем шире она применяется, тем лучше. Разве не так? Как раз нет. Больше не всегда означает лучше. Наступление эпохи микропроцессоров и широкое распространение современных распределенных систем управления (DCS) упростило подачу сигналов тревоги при любом сбое технологического процесса, поскольку затраты на это невелики или равны нулю. В результате в настоящее время на большинстве предприятий имеются системы, подающие ежедневно огромное количество аварийных сигналов и уведомлений, что мешает работе, а иногда приводит к катастрофическим ситуациям.
„Всем известно, насколько важной является система управления аварийными сигналами. Но, несмотря на это, на производстве такие системы управления внедряются достаточно редко", - отмечает Тодд Стауффер, руководитель отдела маркетинга PCS7 в компании Siemens Energy & Automation. Однако события последних лет, среди которых взрыв на нефтеперегонном заводе BP в Техасе в марте 2005 г., в результате которого погибло 15 и получило травмы 170 человек, могут изменить отношение к данной проблеме. В отчете об этом событии говорится, что аварийные сигналы не всегда были технически обоснованы.
Широкое распространение компьютеризированного оборудования и распределенных систем управления сделало более простым и быстрым формирование аварийных сигналов. Согласно новым принципам аварийные сигналы следует формировать только тогда, когда необходимы ответные действия оператора. (С разрешения Siemens Energy & Automation)
Этот и другие подобные инциденты побудили специалистов многих предприятий пересмотреть программы управления аварийными сигналами. Специалисты пытаются найти причины непомерного роста числа аварийных сигналов, изучить и применить передовой опыт и содействовать разработке стандартов. Все это подталкивает многие компании к оценке и внедрению эталонных стандартов, таких, например, как Publication 191 Ассоциации пользователей средств разработки и материалов (EEMUA) „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке", которую многие называют фактическим стандартом систем управления аварийными сигналами. Тим Дональдсон, директор по маркетингу компании Iconics, отмечает: „Распределение и частота/колебания аварийных сигналов, взаимная корреляция, время реакции и изменения в действиях оператора в течение определенного интервала времени являются основными показателями отчетов, которые входят в стандарт EEMUA и обеспечивают полезную информацию для улучшения работы предприятия”. Помимо этого как конечные пользователи, так и поставщики поддерживают развитие таких стандартов, как SP-18.02 ISA «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности». (см. сопроводительный раздел „Стандарты, эталоны, передовой опыт" для получения более подробных сведений).
Предполагается, что одной из причин взрыва на нефтеперегонном заводе BP в Техасе в 2005 г., в результате которого погибло 15 и получило ранения 170 человек, а также был нанесен значительный ущерб имуществу, стала неэффективная система аварийных сигналов.(Источник: Комиссия по химической безопасности и расследованию аварий США)
На большинстве предприятий системы аварийной сигнализации очень часто имеют слишком большое количество аварийных сигналов. Это в высшей степени нецелесообразно. Показатели EEMUA являются эталонными. Они содержатся в Publication 191 (1999), „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Начало работы
Наиболее важным представляется вопрос: почему так велико количество аварийных сигналов? Стауффер объясняет это следующим образом: „В эпоху аналоговых систем аварийные сигналы реализовывались аппаратно. Они должны были соответствующим образом разрабатываться и устанавливаться. Каждый аварийный сигнал имел реальную стоимость - примерно 1000 долл. США. Поэтому они выполнялись тщательно. С развитием современных DCS аварийные сигналы практически ничего не стоят, в связи с чем на предприятиях стремятся устанавливать все возможные сигналы".
Характеристики «хорошего» аварийного сообщения
В число базовых требований к аварийному сообщению, включенных в аттестационный документ EEMUA, входит ясное, непротиворечивое представление информации. На каждом экране дисплея:
• Должно быть четко определено возникшее состояние;
• Следует использовать терминологию, понятную для оператора;
• Должна применяться непротиворечивая система сокращений, основанная на стандартном словаре сокращений для данной отрасли производства;
• Следует использовать согласованную структуру сообщения;
• Система не должна строиться только на основе теговых обозначений и номеров;
• Следует проверить удобство работы на реальном производстве.
Информация из Publication 191 (1999) EEMUA „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Качественная система управления аварийными сигналами должна опираться на руководящий документ. В стандарте ISA SP-18.02 «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности», предложен целостный подход, основанный на модели жизненного цикла, которая включает в себя определяющие принципы, обучение, контроль и аудит.
Именно поэтому операторы сегодня часто сталкиваются с проблемой резкого роста аварийных сигналов. В соответствии с рекомендациями Publication 191 EEMUA средняя частота аварийных сигналов не должна превышать одного сигнала за 10 минут, или не более 144 сигналов в день. В большинстве отраслей промышленности показатели значительно выше и находятся в диапазоне 5-9 сигналов за 10 минут (см. таблицу Эталонные показатели для аварийных сигналов). Дэвид Гэртнер, руководитель служб управления аварийными сигналами в компании Invensys Process Systems, вспоминает, что при запуске производственной установки пяти операторам за полгода поступило 5 миллионов сигналов тревоги. „От одного из устройств было получено 550 000 аварийных сигналов. Устройство работает на протяжении многих месяцев, и до сих пор никто не решился отключить его”.
Практика прошлых лет заключалась в том, чтобы использовать любые аварийные сигналы независимо от того - нужны они или нет. Однако в последнее время при конфигурировании систем аварийных сигналов исходят из необходимости ответных действий со стороны оператора. Этот принцип, который отражает фундаментальные изменения в разработке систем и взаимодействии операторов, стал основой проекта стандарта SP18 ISA. В этом документе дается следующее определение аварийного сигнала: „звуковой и/или визуальный способ привлечения внимания, указывающий оператору на неисправность оборудования, отклонения в технологическом процессе или аномальные условия эксплуатации, которые требуют реагирования”. При такой практике сигнал конфигурируется только в том случае, когда на него необходим ответ оператора.
Адекватная реакция
Особенно важно учитывать следующую рекомендацию: „Не следует ничего предпринимать в отношении событий, для которых нет измерительного инструмента (обычно программного)”.Высказывания Ника Сэнд-за, сопредседателя комитета по разработке стандартов для систем управления аварийными сигналами SP-18.00.02 Общества ISA и менеджера технологий управления процессами химического производства DuPont, подчеркивают необходимость контроля: „Система контроля должна сообщать - в каком состоянии находятся аварийные сигналы. По каким аварийным сигналам проводится техническое обслуживание? Сколько сигналов имеет самый высокий приоритет? Какие из них относятся к системе безопасности? Она также должна сообщать об эффективности работы системы. Соответствует ли ее работа вашим целям и основополагающим принципам?"
Кейт Джоунз, старший менеджер по системам визуализации в Wonderware, добавляет: „Во многих отраслях промышленности, например в фармацевтике и в пищевой промышленности, уже сегодня требуется ведение баз данных по материалам и ингредиентам. Эта информация может также оказаться полезной при анализе аварийных сигналов. Мы можем установить комплект оборудования, работающего в реальном времени. Оно помогает определить место, где возникла проблема, с которой связан аварийный сигнал. Например, можно создать простые гистограммы частот аварийных сигналов. Можно сформировать отчеты об аварийных сигналах в соответствии с разными уровнями системы контроля, которая предоставляет сведения как для менеджеров, так и для исполнителей”.
Представитель компании Invensys Гэртнер утверждает, что двумя основными элементами каждой программы управления аварийными сигналами должны быть: „хороший аналитический инструмент, с помощью которого можно определить устройства, подающие наибольшее количество аварийных сигналов, и эффективный технологический процесс, позволяющий объединить усилия персонала и технические средства для устранения неисправностей. Инструментарий помогает выявить источник проблемы. С его помощью можно определить наиболее частые сигналы, а также ложные и отвлекающие сигналы. Таким образом, мы можем выяснить, где и когда возникают аварийные сигналы, можем провести анализ основных причин и выяснить, почему происходит резкое увеличение сигналов, а также установить для них новые приоритеты. На многих предприятиях высокий приоритет установлен для всех аварийных сигналов. Это неприемлемое решение. Наиболее разумным способом распределения приоритетности является следующий: 5 % аварийных сигналов имеют приоритет № 1, 15% приоритет № 2, и 80% приоритет № 3. В этом случае оператор может отреагировать на те сигналы, которые действительно важны”.
И, тем не менее, Марк МакТэвиш, руководитель группы решений в области управления аварийными сигналами и международных курсов обучения в компании Matrikon, отмечает: „Необходимо помнить, что программное обеспечение - это всего лишь инструмент, оно само по себе не является решением. Аварийные сигналы должны представлять собой исключительные случаи, которые указывают на события, выходящие за приемлемые рамки. Удачные программы управления аварийными сигналами позволяют добиться внедрения на производстве именно такого подхода. Они помогают инженерам изо дня в день управлять своими установками, обеспечивая надежный контроль качества и повышение производительности за счет снижения незапланированных простоев”.
Система, нацеленная на оператора
Тем не менее, даже наличия хорошей системы сигнализации и механизма контроля и анализа ее функционирования еще недостаточно. Необходимо следовать основополагающим принципам, руководящему документу, который должен стать фундаментом для всей системы аварийной сигнализации в целом, подчеркивает Сэндз, сопредседатель ISA SP18. При разработке стандарта „основное внимание мы уделяем не только рационализации аварийных сигналов, - говорит он, - но и жизненному циклу систем управления аварийными сигналами в целом, включая обучение, внесение изменений, совершенствование и периодический контроль на производственном участке. Мы стремимся использовать целостный подход к системе управления аварийными сигналами, построенной в соответствии с ISA 84.00.01, Функциональная безопасность: Системы безопасности с измерительной аппаратурой для сектора обрабатывающей промышленности». (см. диаграмму Модель жизненного цикла системы управления аварийными сигналами)”.
«В данном подходе учитывается участие оператора. Многие недооценивают роль оператора,- отмечает МакТэвиш из Matrikon. - Система управления аварийными сигналами строится вокруг оператора. Инженерам трудно понять проблемы оператора, если они не побывают на его месте и не получат опыт управления аварийными сигналами. Они считают, что знают потребности оператора, но зачастую оказывается, что это не так”.
Удобное отображение информации с помощью человеко-машинного интерфейса является наиболее существенным аспектом системы управления аварийными сигналами. Джонс из Wonderware говорит: „Аварийные сигналы перед поступлением к оператору должны быть отфильтрованы так, чтобы до оператора дошли нужные сообщения. Программное обеспечение предоставляет инструментарий для удобной конфигурации этих параметров, но также важны согласованность и подтверждение ответных действий”.
Аварийный сигнал должен сообщать о том, что необходимо сделать. Например, как отмечает Стауффер из Siemens: „Когда специалист по автоматизации настраивает конфигурацию системы, он может задать обозначение для физического устройства в соответствии с системой идентификационных или контурных тегов ISA. При этом обозначение аварийного сигнала может выглядеть как LIC-120. Но оператору информацию представляют в другом виде. Для него это 'регулятор уровня для резервуара XYZ'. Если в сообщении оператору указываются неверные сведения, то могут возникнуть проблемы. Оператор, а не специалист по автоматизации является адресатом. Он - единственный, кто реагирует на сигналы. Сообщение должно быть сразу же абсолютно понятным для него!"
Эдди Хабиби, основатель и главный исполнительный директор PAS, отмечает: „Эффективность деятельности оператора, которая существенно влияет на надежность и рентабельность предприятия, выходит за рамки совершенствования системы управления аварийными сигналами. Инвестиции в операторов являются такими же важными, как инвестиции в современные системы управления технологическим процессом. Нельзя добиться эффективности работы операторов без учета человеческого фактора. Компетентный оператор хорошо знает технологический процесс, имеет прекрасные навыки общения и обращения с людьми и всегда находится в состоянии готовности в отношении всех событий системы аварийных сигналов”. „До возникновения DCS, -продолжает он, - перед оператором находилась схема технологического процесса, на которой были указаны все трубопроводы и измерительное оборудование. С переходом на управление с помощью ЭВМ сотни схем трубопроводов и контрольно-измерительных приборов были занесены в компьютерные системы. При этом не подумали об интерфейсе оператора. Когда произошел переход от аналоговых систем и физических схем панели управления к цифровым системам с экранными интерфейсами, оператор утратил целостную картину происходящего”.
«Оператору также требуется иметь необходимое образование в области технологических процессов, - подчеркивает Хабиби. - Мы часто недооцениваем роль обучения. Каковы принципы работы насоса или компрессора? Летчик гражданской авиации проходит бесчисленные часы подготовки. Он должен быть достаточно подготовленным перед тем, как ему разрешат взять на себя ответственность за многие жизни. В руках оператора химического производства возможно лежит не меньшее, если не большее количество жизней, но его подготовка обычно ограничивается двухмесячными курсами, а потом он учится на рабочем месте. Необходимо больше внимания уделять повышению квалификации операторов производства”.
Рентабельность
Эффективная система управления аварийными сигналами стоит времени и денег. Однако и неэффективная система также стоит денег и времени, но приводит к снижению производительности и повышению риска для человеческой жизни. Хотя создание новой программы управления аварийными сигналами или пересмотр и реконструкция старой может обескуражить кого угодно, существует масса информации по способам реализации и достижения целей системы управления аварийными сигналами.
Наиболее важным является именно определение цели и способов ее достижения. МакТэвиш говорит, что система должна выдавать своевременные аварийные сигналы, которые не дублируют друг друга, адекватно отражают ситуацию, помогают оператору диагностировать проблему и определять эффективное направление действий. „Целью является поддержание производства в безопасном, надежном рабочем состоянии, которое позволяет выпускать качественный продукт. В конечном итоге целью является финансовая прибыль. Если на предприятии не удается достичь этих целей, то его существование находится под вопросом.
Управление аварийными сигналами - это процесс, а не схема, - подводит итог Гэртнер из Invensys. - Это то же самое, что и производственная безопасность. Это - постоянный процесс, он никогда не заканчивается. Мы уже осознали высокую стоимость низкой эффективности и руководители предприятий больше не хотят за нее расплачиваться”.
Автор: Джини Катцель, Control Engineering
[ http://controlengrussia.com/artykul/article/hmi-upravlenie-avariinymi-signalami/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление аварийными сигналами
11 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
12 расходомер жидкости (газа)
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
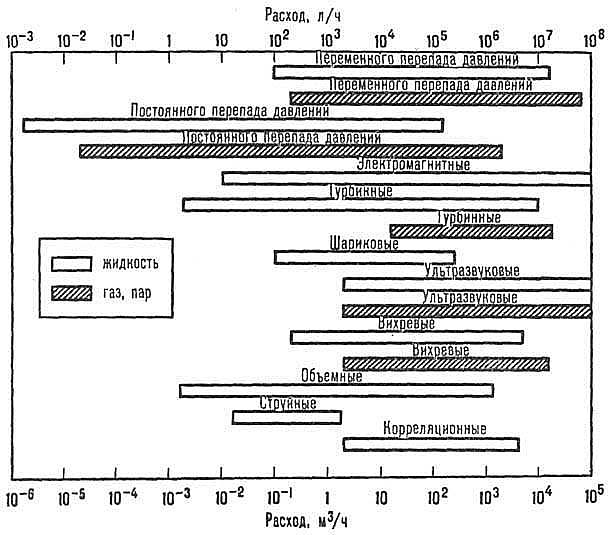
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.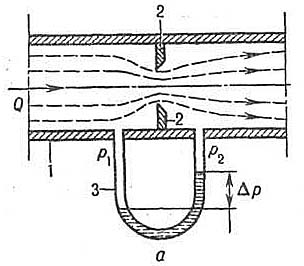
Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
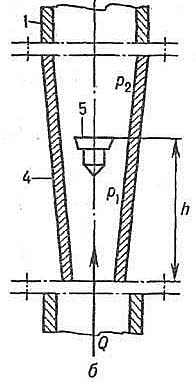
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
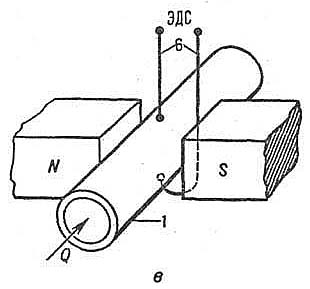
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
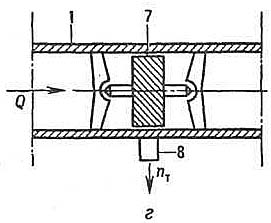
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.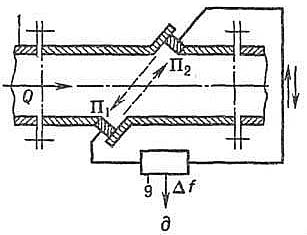
Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.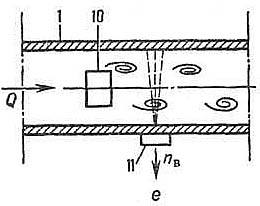
Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
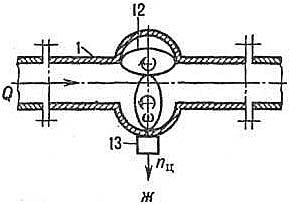
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
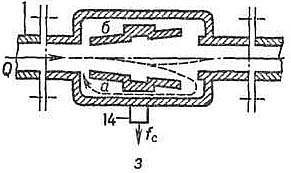
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
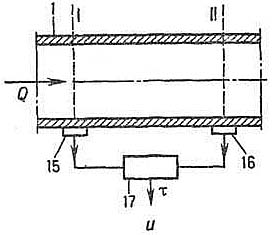
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Русско-немецкий словарь нормативно-технической терминологии > расходомер жидкости (газа)
13 расходомер жидкости (газа)
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > расходомер жидкости (газа)
14 расходомер жидкости (газа)
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Русско-французский словарь нормативно-технической терминологии > расходомер жидкости (газа)
15 система кондиционирования воздуха
система кондиционирования воздуха
Совокупность воздухотехнического оборудования, предназначенная для кондиционирования воздуха в помещениях
[ ГОСТ 22270-76]
система кондиционирования воздуха
Совокупность технических средств для обработки и распределения воздуха, а также автоматического регулирования его параметров с дистанционным управлением всеми процессами
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
система кондиционирования воздуха
Комбинация всех компонент, необходимых для обработки воздуха, в процессе которой осуществляется контроль или понижение температуры, возможно, в комбинации с контролем вентиляции, влажности и чистоты воздуха.
[ДИРЕКТИВА 2002/91/ЕС ЕВРОПЕЙСКОГО ПАРЛАМЕТА И СОВЕТА от 16 декабря 2002 г. по энергетическим характеристикам зданий]
КЛАССИФИКАЦИЯ-
По назначению
-
Комфортные
-
Технологические
-
Комфортные
-
По способу охлаждения воздуха
- Непосредственного охлаждения (с непосредственным охлаждением воздуха)
- Косвенного охлаждения (с водяным охлаждением воздуха - чиллеры и фанкойлы)
-
По степени централизации
- Центральные
-
Зональные
- Однозональные
-
Мультизональные (VRF-системы)
- Местные
-
По степени использования наружного воздуха
-
По автономности
-
По способу комплектации
-
По конструктивному оформлению
-
Моноблочные
-
Сплит-системы
-
По конструктивному исполнению внутреннего блока
-
По количеству внутренних блоков
-
По конструктивному исполнению внутреннего блока
-
Моноблочные
-
По размещению конденсатора
-
По способу охлаждения конденсатора
- С воздушным охлаждением конденсатора
- С осевыми вентиляторами
- С радиальными вентиляторами
- С водяным охлаждением конденсатора
- С использованием проточной (водопроводной, бросовой) воды
- С использованием оборотной (из градирни) воды
-
По способу управления компрессором
-
По режиму работы
-
По дополнительной комплектации
-
По месту установки
-
По способу подачи воздуха
- С непосредственной подачей воздуха в кондиционируемое помещение
-
С подачей воздуха через воздуховод (канальные)
Классификация систем кондиционирования воздухаМ. Г. Тарабанов, директор НИЦ «ИНВЕНТ», канд. техн. наук, вице-президент НП «АВОК», лауреат премии НП «АВОК» «Медаль имени И. Ф. Ливчака», «Медаль имени В. Н. Богословского», otvet@abok.ru
Общие положения
Краткий, но достаточно полный обзор истории развития кондиционирования воздуха представлен в работе А. И. Липы [1], поэтому отметим только несколько моментов. Родоначальником техники кондиционирования воздуха в ее современном понимании считается американский инженер Виллис Хэвилэнд Кэрриер (Willis Haviland Carrier), который в 1902 году в Нью-Йорке в Бруклинской типографии применил поверхностный водяной воздухоохладитель с вентилятором для получения летом в помещении температуры +26,5 °C и относительной влажности 55 %. Вода охлаждалась в аммиачной холодильной машине. Зимой для увлажнения внутреннего воздуха до 55 % использовался водяной пар от бойлера.
Термин «кондиционирование воздуха» был предложен в 1906 году Стюартом Уорреном Крамером (Stuart Warren Cramer).
В отечественной практике некоторые авторы применяют термин «кондиционирование микроклимата». Заметим, что этот термин отличается от «кондиционирования воздуха», так как включает в себя дополнительные факторы, не связанные с состоянием воздушной среды в помещении (шум, инсоляция и др.).
К сожалению, несмотря на солидный возраст термин «кондиционирование воздуха» не получил четкого определения в современных отечественных нормативных документах. Для устранения этого пробела сформулируем: «Кондиционирование воздуха – это создание и автоматическое поддержание в обслуживаемом помещении или технологическом объеме требуемых параметров и качества воздуха независимо от внутренних возмущений и внешних воздействий». К параметрам воздуха относятся: температура, относительная влажность или влагосодержание и подвижность. Качество воздуха включает в себя газовый состав, запыленность, запахи, аэроионный состав, т. е. более широкий круг показателей, чем термин «чистота», используемый в [2].
Комплекс оборудования, элементов и устройств, с помощью которых обеспечивается кондиционирование воздуха в обслуживаемых помещениях, называется системой кондиционирования воздуха (СКВ).
Приведенное выше определение системы кондиционирования воздуха по смыслу полностью совпадает с определением ASHRAE: «”air-conditioning system” – комплекс оборудования для одновременной обработки и регулирования температуры, влажности, чистоты воздуха и распределения последнего в соответствии с заданными требованиями» [3].
Общепринятого, устоявшегося мнения, что следует включать в состав СКВ, к сожалению, нет.
Так, например, по мнению О. Я. Кокорина [4] СКВ может включать в себя:- установку кондиционирования воздуха (УКВ), обеспечивающую необходимые кондиции воздушной среды по тепловлажностным качествам, чистоте, газовому составу и наличию запахов;
- средства автоматического регулирования и контроля за приготовлением воздуха нужных кондиций в УКВ, а также для поддержания в обслуживаемом помещении или сооружении постоянства заданных кондиций воздуха;
- устройства для транспортирования и распределения кондиционированного воздуха;
- устройства для транспортирования и удаления загрязненного внутреннего воздуха;
- устройства для глушения шума, вызываемого работой элементов СКВ;
- устройства для приготовления и транспортирования источников энергии, необходимых для работы аппаратов в СКВ.
В зависимости от конкретных условий некоторые составные части СКВ могут отсутствовать.
Однако согласиться с отдельными пунктами предложенного состава СКВ нельзя, так как если следовать логике автора [4], то в состав СКВ должны войти и системы оборотного водоснабжения, водопровода и канализации, ИТП и трансформаторные, которые также необходимы для работы аппаратов в СКВ.
Достаточно полное представление о структуре СКВ дает разработанная во ВНИИкондиционере «Блок-схема системы кондиционирования воздуха» (рис. 1) [5].
Включенные в эту блок-схему подсистемы обработки воздуха по своему функциональному назначению делятся на блоки:
- основной обработки и перемещения: Б1.1 – приемный, Б1.8 – очистки, Б1.2 – сухого (первого) подогрева, Б1.3 – охлаждения, Б1.6 – тепловлажностной обработки, Б1.9 – перемещения приточного воздуха;
- дополнительной обработки и перемещения: Б2.1 – утилизации, Б2.2 – предварительного подогрева, Б2.3 – доводки общей (второй подогрев, дополнительное охлаждение), Б2.4 – зональной доводки, Б2.5 – местной доводки (эжекционные доводчики и др.), Б2.7 – шумоглушения, Б2.8 – перемещения рециркуляционного воздуха;
- специальной обработки: Б5.5 – тонкой очистки;
- воздушной сети: Б4.2 – воздухораспределительных устройств, Б4.3 – вытяжных устройств, Б4.5 – воздуховодов;
- автоматизации – арматуры – Б3.1.
Помимо этих блоков в СКВ может входить система холодоснабжения (снабжение электроэнергией и теплом осуществляется, как правило, централизованно). Ее включение в состав СКВ, видимо, относится к автономным кондиционерам (см. далее).
Для определения состава оборудования, входящего в СКВ, и границ раздела целесообразно воспользоваться делением на разделы, которое сложилось в практике проектирования.
В частности, при выполнении проектов кондиционирования воздуха достаточно серьезных объектов обычно выделяют в самостоятельные разделы: теплоснабжение СКВ; холодоснабжение и холодильные центры; электроснабжение; автоматизация; водоснабжение, в том числе оборотное, канализация и дренаж.
Причем по каждому из разделов составляют свою спецификацию, в которую включено оборудование, материалы и арматура, относящиеся к своему конкретному разделу.
Таким образом, в состав СКВ следует включить:- УКВ, предназначенную для очистки и тепловлажностной обработки и получения необходимого качества воздуха и его транспортировки по сети воздуховодов до обслуживаемого помещения или технического объема;
- сеть приточных воздуховодов с воздухораспределителями, клапанами и регулирующими устройствами;
- вытяжной вентилятор и сеть вытяжных и рециркуляционных воздуховодов с сетевым оборудованием;
- сеть фреоновых трубопроводов для сплит-систем и VRV-систем с кабелями связи наружных блоков с внутренними;
- фэнкойлы, эжекционные доводчики, моноблоки, холодные и теплые потолки и балки и др. доводчики для охлаждения и (или) нагревания непосредственно внутреннего воздуха;
- оборудование для утилизации теплоты и холода;
- дополнительные воздушные фильтры, шумоглушители и другие элементы.
И даже систему автоматики, входящую в СКВ как бы по определению, целесообразно выделить отдельно, так как ее проектируют инженеры другой специальности, хотя и по заданию так называемых технологов СКВ.
Границей СКВ и систем теплохолодоснабжения можно считать узлы регулирования, а границей электроснабжения и автоматики – электрические щиты и щиты управления, которые в последнее время очень часто делают совмещенными.Классификация систем кондиционирования воздуха
Проблемам классификации СКВ в большей или меньшей степени уделяли внимание практически все авторы учебников и монографий по кондиционированию воздуха. Вот что написал по этому вопросу известный специалист, доктор техн. наук А. А. Рымкевич [6]: «Анализ иерархической структуры самих СКВ прежде всего требует их классификации и только затем их декомпозиции на подсистемы. …Однако для СКВ, решения которых базируются на учете большого числа данных, разработать такую классификацию всегда сложно. Не случайно в литературе нет единого мнения по данному вопросу, и поэтому многие известные авторы… предложили различные методы классификации».
Предложенная А. А. Рымкеви-чем концепция выбора признаков классификации СКВ сформулирована очень точно, и с ней нельзя не согласиться. Проблема состоит в том, как этой концепцией воспользоваться и какие признаки считать определяющими, а какие вторичными, и как точно сформулировать эти признаки.
В начале восьмидесятых годов прошлого века наиболее полная классификация СКВ была предложена в работе Б. В. Баркалова и Е. Е. Карписа [7].
Основные признаки этой классификации с некоторыми дополнениями использованы и в недавно изданной монографии А. Г. Сотникова [8] и в других работах, однако некоторые формулировки отдельных признаков требуют уточнения и корректировки.
Например, для опытных специалистов не составит труда разделить СКВ на центральные и местные, посмотрим, как признак такого деления сформулирован разными авторами.
Б. В. Баркалов, Е. Е. Карпис пишут [7]: «В зависимости от расположения кондиционеров по отношению к обслуживаемым помеще-ниям СКВ делятся на центральные и местные». А. Г. Сотников [8] считает необходимым дополнить: «Деление на местные и центральные СКВ учитывает как место установки кондиционера, так и группировку помещений по системам», а О. Я. Кокорин уточняет: «По характеру связи с обслуживаемым помещением можно подразделить СКВ на три вида: центральные, местные и центрально-местные. Центральные СКВ характеризуются расположением УКВ в удалении от обслуживаемых объектов и наличием приточных воздуховодов значительной протяженности. Местные СКВ характеризуются расположением УКВ в самом обслуживаемом помещении или в непосредственной близости от него, при отсутствии (или наличии весьма коротких) приточных воздуховодов. Центрально-местные СКВ характеризуются как наличием УКВ в удалении от обслуживаемых объектов, так и местных УКВ, располагаемых в самих помещениях или в непосредственной близости от них».
Трудно понять, что имеется в виду под группировкой помещений по системам и что считается протяженными или весьма короткими воздуховодами. Например, кондиционеры, обслуживающие текстильные цеха на Волжском заводе синтетического волокна, имеют производительность по воздуху до 240 м3/ч и расположены рядом с обслуживаемыми помещениями, то есть непосредственно за стенами, но никто из указанных выше авторов не отнес бы их к местным системам.
Несколько иной признак клас-сификации предложил Е. В. Стефанов [9]: «… по степени централизации – на системы центральные, обслуживающие из одного центра несколько помещений, и местные, устраиваемые для отдельных помещений и располагающиеся, как правило, в самих обслуживаемых помещениях».
К сожалению, и эта формулировка является нечеткой, так как одно большое помещение могут обслуживать несколько центральных кондиционеров, а группу небольших помещений – один местный кондиционер.
Фактически в отечественной практике негласно действовал совсем другой признак классификации: все кондиционеры, выпускавшиеся Харьковским заводом «Кондиционер», кроме шкафных, считались центральными, а все кондиционеры, выпускавшиеся Домодедовским заводом «Кондиционер», кроме горизонтальных производительностью 10 и 20 тыс. м3/ч, – относились к местным.
Конечно, сегодня такое деление выглядит смешным, а между тем в нем был определенный здравый смысл.
Известно, что в местных системах используются готовые агрегаты полной заводской сборки обычно шкафного типа со стандартным набором тепломассообменного оборудования с уже готовыми, заданными заранее техническими характеристиками, поэтому местные УКВ не проектируют, а подбирают для конкретного обслуживаемого помещения или группы небольших однотипных помещений.
Максимальная производительность местных систем по воздуху обычно не превышает 20–30 тыс. м3/ч.
Центральные кондиционеры могут быть также полной заводской сборки или собираются на месте монтажа, причем технические характеристики всех элементов, включая воздушные фильтры, вентиляторы и тепломассообменное оборудование, задаются производителями в очень широких пределах, поэтому такие кондиционеры не подбирают, а проектируют, а затем изготавливают в соответствии с бланком-заказом для конкретного объекта.
Обычно центральные кондиционеры собирают в виде горизонтальных блоков, причем производительность таких кондиционеров по воздуху значительно больше, чем у местных и достигает 100–250 тыс. м3/ч у разных фирм-производителей.
Очевидно, что отмеченные признаки относятся к УКВ, но их можно использовать и для классификации СКВ, например, СКВ с центральной УКВ – центральная СКВ, а с местной УКВ – местная СКВ. Такой подход не исключает полностью признаки, предложенные другими авторами, а дополняет их, исключая некоторые неопределенности, типа протяженности воздуховодов и др.
Для дальнейшей классификации СКВ рассмотрим схему ее функционирования.
На параметры внутреннего воздуха в обслуживаемом помещении или технологическом объеме оказывают воздействие внутренние возмущения, то есть изменяющиеся тепло- и влаговыделения, а также внешние факторы, например, изменение температуры и влагосодержания наружного воздуха, воздействие на остекленный фасад прямой солнечной радиации в разное время суток и др.
Задача СКВ состоит в том, чтобы улавливать и своевременно устранять последствия этих возмущений и воздействий для сохранения параметров внутреннего воздуха в заданных пределах, используя систему автоматического регулирования и необходимый набор оборудования (воздухоохладители, воздухонагреватели, увлажнители и др.), а также источники теплоты и холода.
Поддерживать требуемые параметры внутреннего воздуха можно изменяя параметры или расход приточного воздуха, подаваемого в помещение извне, или с помощью аппаратов, установленных непосредственно в помещении, так называемых доводчиков.
Сегодня в качестве доводчиков используют внутренние блоки сплит-систем и VRV-систем, фэнкойлы, моноблоки, охлаждаемые потолки и балки и другие элементы.
К сожалению, в классификации [7] вместо понятия «доводчики» используется понятие «водовоздушные СКВ», а в классификации [8] дополнительно вводится термин «водо- и фреоновоздушная СКВ». С подобными предложениями нельзя согласиться в принципе, так как их авторы вольно или невольно присваивают сплит-системам или фэнкойлам статус систем кондиционирования воздуха, которыми они не являются и, естественно, не могут входить в классификацию СКВ, поскольку являются всего лишь местными охладителями или нагревателями, то есть не более чем доводчиками.
Справедливости ради отметим, что Б. В. Баркалов начинает описание центральных водовоздушных систем очень точной фразой: «В каждое помещение вводится наружный воздух, приготовленный в центральном кондиционере. Перед выпуском в помещение он смешивается с воздухом данного помещения, предварительно охлажденным или нагретым в теплообменниках кондиционеров?доводчиков, снабжаемых холодной и горячей водой». Приведенная цитата показывает, что автор хорошо понимает неопределенность предложенного им признака классификации и поэтому сразу поясняет, что он имеет в виду под центральными водовоздушными системами.
Системы без доводчиков могут быть прямоточными, когда в помещение подается обработанный наружный воздух, и с рециркуляцией, когда к наружному воздуху подмешивают воздух, забираемый из помещения. Кроме того, технологические СКВ, обслуживающие помещения или аппараты без пребывания людей, могут работать без подачи наружного воздуха со 100 % рециркуляцией. В зависимости от алгоритма работы СКВ различают системы с постоянной рециркуляцией, в которых соотношение количества наружного и рециркуляционного воздуха во время работы не изменяется, и СКВ с переменной рециркуляцией, в которых количество наружного воздуха может изменяться от 100 % до некоторого нормируемого минимального уровня.
Кроме того, системы с рециркуляцией могут быть одновентиляторными и двухвентиляторными. В первых системах подача приточного воздуха в помещение, а также забор наружного и рециркуляционного воздуха осуществляется приточным вентилятором УКВ. Во втором случае для удаления воздуха из помещения и подачи его на рециркуляцию или на выброс применяют дополнительный вытяжной вентилятор.
Независимо от схемы компоновки и устройства отдельных элементов СКВ подразделяют также по их назначению. Многие авторы делят СКВ на комфортные, технологические и комфортно-технологические. Более удачной и полной представляется классификация СКВ по назначению на эргономической основе, разработанная ВНИИкондиционером [5].
Определено, что СКВ могут выполнять одну из трех функций обслуживания: машин; машин + людей; людей.
1-я группа (символ «машина») определена как технологические СКВ. СКВ этой группы обслуживают технологические аппараты, камеры, боксы, машины и т. п., то есть применяются в тех случаях, когда условия воздушной среды диктуются обеспечением работоспособности технологического оборудования. При этом параметры воздушной среды могут отличаться от тех, которые определяются санитарно-гигиеническими нормами.
1-я группа имеет две модификации:- Подгруппа 1–1 включает в себя кондиционируемые объекты, полностью исключающие возможность пребывания в них человека, то есть это системы технологического охлаждения, обдува электронных блоков вычислительных машин, шахты обдува волокна прядильных машин и т. п.
- Подгруппа 1–2 включает в себя кондиционируемые объекты: технологические аппараты (машины, камеры, боксы) и помещения с особыми параметрами воздушной среды (калориметрического, экологического и другого назначения), в которых человек отсутствует или находится эпизодически (для снятия показаний приборов, изменения режима работы и т. д.).
Если для группы 1–1 отсутствуют какие-либо ограничения по параметрам и составу воздушной среды, то для объектов подгруппы 1–2 газовый состав воздушной среды должен находиться в пределах, установленных ГОСТ.
2-я группа (символ «машина + человек») определена как технологически комфортные СКВ. СКВ этой группы обслуживают производственные помещения, в которых длительно пребывают люди.
2-я группа имеет три модификации:- Подгруппа 2–1. Технологически комфортные СКВ обеспечивают условия нормального осуществления технологических процессов как для производств, в которых затруднено или практически невозможно получение продукции без поддержания определенных параметров воздушной среды, так и для производств, в которых колебания параметров воздуха существенно влияют на качество продукции и величину брака.
- Для этих помещений СКВ устраивается в первую (и основную) очередь по требованиям технологии, однако в связи с наличием в этих помещениях людей, параметры КВ устанавливают с учетом требований санитарно-гигиенических норм.
- Подгруппа 2–2. СКВ создаются для исключения дискомфортных условий труда при тяжелых режимах работы людей (кабины крановщиков мостовых кранов металлургических заводов и ТЭЦ, кабины строительно-дорожных машин и т. д.). Производственные или экономические аспекты для этих установок имеют второстепенное значение.
- Подгруппа 2–3. СКВ обеспечивают в производственных помещениях комфортные условия труда, способствующие повышению производительности труда, улучшению проведения основных технологических режимов, снижению заболеваемости, уменьшению эксплуатационных затрат и т. п.
3-я группа (символ «люди») определена как комфортные СКВ, обеспечивающие санитарно-гигиенические условия труда, отдыха или иного пребывания людей в помещениях гражданских зданий, то есть вне промышленного производства.
Эта группа имеет две модификации:- Подгруппа 3–1. СКВ обслуживают помещения общественных зданий, в которых для одной части людей пребывание в них кратковременно (например, покупатели в универмаге), а для другой – длительно (например, продавцы в этом же универмаге).
- Подгруппа 3–2. СКВ обеспечивают оптимальные условия пребывания людей в жилых помещениях.
В классификацию ВНИИконди-ционера необходимо ввести еще одну группу – медицинские СКВ. Очевидно, что СКВ, обслуживающие операционные, реанимационные или палаты интенсивной терапии, никак нельзя считать комфортными, а чтобы отнести их к технологическим, надо в качестве «машины» рассматривать самого человека, что просто глупо.
Медицинские СКВ должны иметь две подгруппы:- Подгруппа 4–1. СКВ обслуживают операционные, реанимационные и т. п. помещения.
- Подгруппа 4–2. СКВ обеспечивают требуемые параметры воздуха в палатах, кабинетах врачей, процедурных и т. п.
Для завершения классификации СКВ рассмотрим еще несколько признаков.
По типу системы холодоснабжения различают автономные и неавтономные СКВ. В автономных источник холода встроен в кондиционер, в неавтономных – источником холода является отдельный холодильный центр. Кроме того, в автономных кондиционерах в воздухоохладитель может подаваться кипящий хладон или жидкий промежуточный хладоноситель (холодная вода, растворы). Заметим, что на многих объектах мы использовали схему с подачей хладона в воздухоохладитель центрального кондиционера от расположенной рядом холодильной машины или внешнего блока VRV.
По способу компенсации изменяющихся тепловых и (или) влажностных возмущений в обслуживаемом помещении различают СКВ с постоянным расходом воздуха (CAV) – системы, в которых внутренние параметры поддерживают изменяя температуру и влажность приточного воздуха (качественное регулирование), и системы с переменным расходом воздуха (VAV) – системы с количественным регулированием.
По числу воздуховодов для подачи кондиционированного воздуха в помещенияСКВ делятся на одноканальные и двухканальные, при этом приточный воздух в каждом канале имеет разную температуру и влажность, что позволяет, изменяя соотношение приточного воздуха, подаваемого через каждый канал, поддерживать требуемые параметры в обслуживаемом помещении.
По числу точек стабилизации одноименного параметра (t; φ)в большом помещении или группе небольших помещений различают одно- и многозональные СКВ.
–это СКВ с местными доводчиками. В этих СКВ центральная или местная УКВ подает в помещение санитарную норму наружного воздуха, даже не обязательно обработанного, а местные доводчики обеспечивают поддержание в помещении требуемых параметров воздуха (температуры, относительной влажности и подвижности).
Сегодня в качестве местных доводчиков применяют: внутренние блоки сплит-систем или VRV-систем; фэнкойлы (двух- или четырехтрубные); моноблоки (напольные, потолочные или настенные); эжекционные доводчики; местные увлажнители воздуха; охлаждаемые и нагреваемые потолки; охлаждающие балки (пассивные и активированные).
Все указанные доводчики сами по себе не являются кондиционерами, хотя их и называют так продавцы оборудования.
Известно, что некоторые фирмы работают над созданием, например, фэнкойлов или сплит-систем, подающих в помещение наружный воздух. Но, если это и произойдет в массовом масштабе, то ничего страшного с классификацией не случится, просто это оборудование получит статус местных кондиционеров.
Блок-схема рассмотренной классификации СКВ приведена на рис. 2.
Помимо рассмотренных признаков в схему на рис. 2 включен еще один: наличие утилизаторов теплоты и холода, которые могут быть как в центральных, так и в местных СКВ. Причем необходимо различать системы утилизации типа воздух-воздух, к которым относятся схемы с промежуточным теплоносителем, с пластинчатыми теплообменниками* и с регенеративными вращающимися и переключаемыми теплообменниками, а также системы утилизации теплоты оборотной воды и теплоты обратного теплоносителя систем централизованного теплоснабжения и систем технологического жидкостного охлаждения.Литература
- Липа А. И. Кондиционирование воздуха. Основы теории. Совре-менные технологии обработки воздуха. – Одесса: Издательство ВМВ, 2010.
- СНиП 41–01–2003. Отопление, вентиляция, кондиционирование. М.: Госстрой России. – 2004.
- Англо-русский терминологический словарь по отоплению, вентиляции, кондиционированию воздуха и охлаждению. М.: Изд-во «АВОК-ПРЕСС», 2002.
- Кокорин О. Я. Энергосберегаю-щие системы кондиционирования воздуха. ООО «ЛЭС». – М., 2007.
- Кондиционеры. Каталог-спра-воч-ник ЦНИИТЭстроймаш. – М., 1981.
- Рымкевич А. А. Системный анализ оптимизации общеобменной вентиляции и кондиционирования воздуха. Изд. 1. – М.: Стройиздат, 1990.
- Баркалов Б. В., Карпис Е. Е. Кондиционирование воздуха в промышленных, общественных и жилых зданиях. Изд. 2. – М.: Стройиздат, 1982.
- Сотников А. Г. Процессы, аппараты и системы кондиционирования воздуха и вентиляции. Т. 1. ООО «АТ». – С.-Петербург, 2005.
- Стефанов Е. В. Вентиляция и кондиционирование воздуха. – С.-Петербург: Изд-во «АВОК-Северо-Запад», 2005.
[ http://www.abok.ru/for_spec/articles.php?nid=5029]
Тематики
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > система кондиционирования воздуха
16 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
17 система кондиционирования воздуха
система кондиционирования воздуха
Совокупность воздухотехнического оборудования, предназначенная для кондиционирования воздуха в помещениях
[ ГОСТ 22270-76]
система кондиционирования воздуха
Совокупность технических средств для обработки и распределения воздуха, а также автоматического регулирования его параметров с дистанционным управлением всеми процессами
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
система кондиционирования воздуха
Комбинация всех компонент, необходимых для обработки воздуха, в процессе которой осуществляется контроль или понижение температуры, возможно, в комбинации с контролем вентиляции, влажности и чистоты воздуха.
[ДИРЕКТИВА 2002/91/ЕС ЕВРОПЕЙСКОГО ПАРЛАМЕТА И СОВЕТА от 16 декабря 2002 г. по энергетическим характеристикам зданий]
КЛАССИФИКАЦИЯ-
По назначению
-
Комфортные
-
Технологические
-
Комфортные
-
По способу охлаждения воздуха
- Непосредственного охлаждения (с непосредственным охлаждением воздуха)
- Косвенного охлаждения (с водяным охлаждением воздуха - чиллеры и фанкойлы)
-
По степени централизации
- Центральные
-
Зональные
- Однозональные
-
Мультизональные (VRF-системы)
- Местные
-
По степени использования наружного воздуха
-
По автономности
-
По способу комплектации
-
По конструктивному оформлению
-
Моноблочные
-
Сплит-системы
-
По конструктивному исполнению внутреннего блока
-
По количеству внутренних блоков
-
По конструктивному исполнению внутреннего блока
-
Моноблочные
-
По размещению конденсатора
-
По способу охлаждения конденсатора
- С воздушным охлаждением конденсатора
- С осевыми вентиляторами
- С радиальными вентиляторами
- С водяным охлаждением конденсатора
- С использованием проточной (водопроводной, бросовой) воды
- С использованием оборотной (из градирни) воды
-
По способу управления компрессором
-
По режиму работы
-
По дополнительной комплектации
-
По месту установки
-
По способу подачи воздуха
- С непосредственной подачей воздуха в кондиционируемое помещение
-
С подачей воздуха через воздуховод (канальные)
Классификация систем кондиционирования воздухаМ. Г. Тарабанов, директор НИЦ «ИНВЕНТ», канд. техн. наук, вице-президент НП «АВОК», лауреат премии НП «АВОК» «Медаль имени И. Ф. Ливчака», «Медаль имени В. Н. Богословского», otvet@abok.ru
Общие положения
Краткий, но достаточно полный обзор истории развития кондиционирования воздуха представлен в работе А. И. Липы [1], поэтому отметим только несколько моментов. Родоначальником техники кондиционирования воздуха в ее современном понимании считается американский инженер Виллис Хэвилэнд Кэрриер (Willis Haviland Carrier), который в 1902 году в Нью-Йорке в Бруклинской типографии применил поверхностный водяной воздухоохладитель с вентилятором для получения летом в помещении температуры +26,5 °C и относительной влажности 55 %. Вода охлаждалась в аммиачной холодильной машине. Зимой для увлажнения внутреннего воздуха до 55 % использовался водяной пар от бойлера.
Термин «кондиционирование воздуха» был предложен в 1906 году Стюартом Уорреном Крамером (Stuart Warren Cramer).
В отечественной практике некоторые авторы применяют термин «кондиционирование микроклимата». Заметим, что этот термин отличается от «кондиционирования воздуха», так как включает в себя дополнительные факторы, не связанные с состоянием воздушной среды в помещении (шум, инсоляция и др.).
К сожалению, несмотря на солидный возраст термин «кондиционирование воздуха» не получил четкого определения в современных отечественных нормативных документах. Для устранения этого пробела сформулируем: «Кондиционирование воздуха – это создание и автоматическое поддержание в обслуживаемом помещении или технологическом объеме требуемых параметров и качества воздуха независимо от внутренних возмущений и внешних воздействий». К параметрам воздуха относятся: температура, относительная влажность или влагосодержание и подвижность. Качество воздуха включает в себя газовый состав, запыленность, запахи, аэроионный состав, т. е. более широкий круг показателей, чем термин «чистота», используемый в [2].
Комплекс оборудования, элементов и устройств, с помощью которых обеспечивается кондиционирование воздуха в обслуживаемых помещениях, называется системой кондиционирования воздуха (СКВ).
Приведенное выше определение системы кондиционирования воздуха по смыслу полностью совпадает с определением ASHRAE: «”air-conditioning system” – комплекс оборудования для одновременной обработки и регулирования температуры, влажности, чистоты воздуха и распределения последнего в соответствии с заданными требованиями» [3].
Общепринятого, устоявшегося мнения, что следует включать в состав СКВ, к сожалению, нет.
Так, например, по мнению О. Я. Кокорина [4] СКВ может включать в себя:- установку кондиционирования воздуха (УКВ), обеспечивающую необходимые кондиции воздушной среды по тепловлажностным качествам, чистоте, газовому составу и наличию запахов;
- средства автоматического регулирования и контроля за приготовлением воздуха нужных кондиций в УКВ, а также для поддержания в обслуживаемом помещении или сооружении постоянства заданных кондиций воздуха;
- устройства для транспортирования и распределения кондиционированного воздуха;
- устройства для транспортирования и удаления загрязненного внутреннего воздуха;
- устройства для глушения шума, вызываемого работой элементов СКВ;
- устройства для приготовления и транспортирования источников энергии, необходимых для работы аппаратов в СКВ.
В зависимости от конкретных условий некоторые составные части СКВ могут отсутствовать.
Однако согласиться с отдельными пунктами предложенного состава СКВ нельзя, так как если следовать логике автора [4], то в состав СКВ должны войти и системы оборотного водоснабжения, водопровода и канализации, ИТП и трансформаторные, которые также необходимы для работы аппаратов в СКВ.
Достаточно полное представление о структуре СКВ дает разработанная во ВНИИкондиционере «Блок-схема системы кондиционирования воздуха» (рис. 1) [5].Включенные в эту блок-схему подсистемы обработки воздуха по своему функциональному назначению делятся на блоки:
- основной обработки и перемещения: Б1.1 – приемный, Б1.8 – очистки, Б1.2 – сухого (первого) подогрева, Б1.3 – охлаждения, Б1.6 – тепловлажностной обработки, Б1.9 – перемещения приточного воздуха;
- дополнительной обработки и перемещения: Б2.1 – утилизации, Б2.2 – предварительного подогрева, Б2.3 – доводки общей (второй подогрев, дополнительное охлаждение), Б2.4 – зональной доводки, Б2.5 – местной доводки (эжекционные доводчики и др.), Б2.7 – шумоглушения, Б2.8 – перемещения рециркуляционного воздуха;
- специальной обработки: Б5.5 – тонкой очистки;
- воздушной сети: Б4.2 – воздухораспределительных устройств, Б4.3 – вытяжных устройств, Б4.5 – воздуховодов;
- автоматизации – арматуры – Б3.1.
Помимо этих блоков в СКВ может входить система холодоснабжения (снабжение электроэнергией и теплом осуществляется, как правило, централизованно). Ее включение в состав СКВ, видимо, относится к автономным кондиционерам (см. далее).
Для определения состава оборудования, входящего в СКВ, и границ раздела целесообразно воспользоваться делением на разделы, которое сложилось в практике проектирования.
В частности, при выполнении проектов кондиционирования воздуха достаточно серьезных объектов обычно выделяют в самостоятельные разделы: теплоснабжение СКВ; холодоснабжение и холодильные центры; электроснабжение; автоматизация; водоснабжение, в том числе оборотное, канализация и дренаж.
Причем по каждому из разделов составляют свою спецификацию, в которую включено оборудование, материалы и арматура, относящиеся к своему конкретному разделу.
Таким образом, в состав СКВ следует включить:- УКВ, предназначенную для очистки и тепловлажностной обработки и получения необходимого качества воздуха и его транспортировки по сети воздуховодов до обслуживаемого помещения или технического объема;
- сеть приточных воздуховодов с воздухораспределителями, клапанами и регулирующими устройствами;
- вытяжной вентилятор и сеть вытяжных и рециркуляционных воздуховодов с сетевым оборудованием;
- сеть фреоновых трубопроводов для сплит-систем и VRV-систем с кабелями связи наружных блоков с внутренними;
- фэнкойлы, эжекционные доводчики, моноблоки, холодные и теплые потолки и балки и др. доводчики для охлаждения и (или) нагревания непосредственно внутреннего воздуха;
- оборудование для утилизации теплоты и холода;
- дополнительные воздушные фильтры, шумоглушители и другие элементы.
И даже систему автоматики, входящую в СКВ как бы по определению, целесообразно выделить отдельно, так как ее проектируют инженеры другой специальности, хотя и по заданию так называемых технологов СКВ.
Границей СКВ и систем теплохолодоснабжения можно считать узлы регулирования, а границей электроснабжения и автоматики – электрические щиты и щиты управления, которые в последнее время очень часто делают совмещенными.Классификация систем кондиционирования воздуха
Проблемам классификации СКВ в большей или меньшей степени уделяли внимание практически все авторы учебников и монографий по кондиционированию воздуха. Вот что написал по этому вопросу известный специалист, доктор техн. наук А. А. Рымкевич [6]: «Анализ иерархической структуры самих СКВ прежде всего требует их классификации и только затем их декомпозиции на подсистемы. …Однако для СКВ, решения которых базируются на учете большого числа данных, разработать такую классификацию всегда сложно. Не случайно в литературе нет единого мнения по данному вопросу, и поэтому многие известные авторы… предложили различные методы классификации».
Предложенная А. А. Рымкеви-чем концепция выбора признаков классификации СКВ сформулирована очень точно, и с ней нельзя не согласиться. Проблема состоит в том, как этой концепцией воспользоваться и какие признаки считать определяющими, а какие вторичными, и как точно сформулировать эти признаки.
В начале восьмидесятых годов прошлого века наиболее полная классификация СКВ была предложена в работе Б. В. Баркалова и Е. Е. Карписа [7].
Основные признаки этой классификации с некоторыми дополнениями использованы и в недавно изданной монографии А. Г. Сотникова [8] и в других работах, однако некоторые формулировки отдельных признаков требуют уточнения и корректировки.
Например, для опытных специалистов не составит труда разделить СКВ на центральные и местные, посмотрим, как признак такого деления сформулирован разными авторами.
Б. В. Баркалов, Е. Е. Карпис пишут [7]: «В зависимости от расположения кондиционеров по отношению к обслуживаемым помеще-ниям СКВ делятся на центральные и местные». А. Г. Сотников [8] считает необходимым дополнить: «Деление на местные и центральные СКВ учитывает как место установки кондиционера, так и группировку помещений по системам», а О. Я. Кокорин уточняет: «По характеру связи с обслуживаемым помещением можно подразделить СКВ на три вида: центральные, местные и центрально-местные. Центральные СКВ характеризуются расположением УКВ в удалении от обслуживаемых объектов и наличием приточных воздуховодов значительной протяженности. Местные СКВ характеризуются расположением УКВ в самом обслуживаемом помещении или в непосредственной близости от него, при отсутствии (или наличии весьма коротких) приточных воздуховодов. Центрально-местные СКВ характеризуются как наличием УКВ в удалении от обслуживаемых объектов, так и местных УКВ, располагаемых в самих помещениях или в непосредственной близости от них».
Трудно понять, что имеется в виду под группировкой помещений по системам и что считается протяженными или весьма короткими воздуховодами. Например, кондиционеры, обслуживающие текстильные цеха на Волжском заводе синтетического волокна, имеют производительность по воздуху до 240 м3/ч и расположены рядом с обслуживаемыми помещениями, то есть непосредственно за стенами, но никто из указанных выше авторов не отнес бы их к местным системам.
Несколько иной признак клас-сификации предложил Е. В. Стефанов [9]: «… по степени централизации – на системы центральные, обслуживающие из одного центра несколько помещений, и местные, устраиваемые для отдельных помещений и располагающиеся, как правило, в самих обслуживаемых помещениях».
К сожалению, и эта формулировка является нечеткой, так как одно большое помещение могут обслуживать несколько центральных кондиционеров, а группу небольших помещений – один местный кондиционер.
Фактически в отечественной практике негласно действовал совсем другой признак классификации: все кондиционеры, выпускавшиеся Харьковским заводом «Кондиционер», кроме шкафных, считались центральными, а все кондиционеры, выпускавшиеся Домодедовским заводом «Кондиционер», кроме горизонтальных производительностью 10 и 20 тыс. м3/ч, – относились к местным.
Конечно, сегодня такое деление выглядит смешным, а между тем в нем был определенный здравый смысл.
Известно, что в местных системах используются готовые агрегаты полной заводской сборки обычно шкафного типа со стандартным набором тепломассообменного оборудования с уже готовыми, заданными заранее техническими характеристиками, поэтому местные УКВ не проектируют, а подбирают для конкретного обслуживаемого помещения или группы небольших однотипных помещений.
Максимальная производительность местных систем по воздуху обычно не превышает 20–30 тыс. м3/ч.
Центральные кондиционеры могут быть также полной заводской сборки или собираются на месте монтажа, причем технические характеристики всех элементов, включая воздушные фильтры, вентиляторы и тепломассообменное оборудование, задаются производителями в очень широких пределах, поэтому такие кондиционеры не подбирают, а проектируют, а затем изготавливают в соответствии с бланком-заказом для конкретного объекта.
Обычно центральные кондиционеры собирают в виде горизонтальных блоков, причем производительность таких кондиционеров по воздуху значительно больше, чем у местных и достигает 100–250 тыс. м3/ч у разных фирм-производителей.
Очевидно, что отмеченные признаки относятся к УКВ, но их можно использовать и для классификации СКВ, например, СКВ с центральной УКВ – центральная СКВ, а с местной УКВ – местная СКВ. Такой подход не исключает полностью признаки, предложенные другими авторами, а дополняет их, исключая некоторые неопределенности, типа протяженности воздуховодов и др.
Для дальнейшей классификации СКВ рассмотрим схему ее функционирования.
На параметры внутреннего воздуха в обслуживаемом помещении или технологическом объеме оказывают воздействие внутренние возмущения, то есть изменяющиеся тепло- и влаговыделения, а также внешние факторы, например, изменение температуры и влагосодержания наружного воздуха, воздействие на остекленный фасад прямой солнечной радиации в разное время суток и др.
Задача СКВ состоит в том, чтобы улавливать и своевременно устранять последствия этих возмущений и воздействий для сохранения параметров внутреннего воздуха в заданных пределах, используя систему автоматического регулирования и необходимый набор оборудования (воздухоохладители, воздухонагреватели, увлажнители и др.), а также источники теплоты и холода.
Поддерживать требуемые параметры внутреннего воздуха можно изменяя параметры или расход приточного воздуха, подаваемого в помещение извне, или с помощью аппаратов, установленных непосредственно в помещении, так называемых доводчиков.
Сегодня в качестве доводчиков используют внутренние блоки сплит-систем и VRV-систем, фэнкойлы, моноблоки, охлаждаемые потолки и балки и другие элементы.
К сожалению, в классификации [7] вместо понятия «доводчики» используется понятие «водовоздушные СКВ», а в классификации [8] дополнительно вводится термин «водо- и фреоновоздушная СКВ». С подобными предложениями нельзя согласиться в принципе, так как их авторы вольно или невольно присваивают сплит-системам или фэнкойлам статус систем кондиционирования воздуха, которыми они не являются и, естественно, не могут входить в классификацию СКВ, поскольку являются всего лишь местными охладителями или нагревателями, то есть не более чем доводчиками.
Справедливости ради отметим, что Б. В. Баркалов начинает описание центральных водовоздушных систем очень точной фразой: «В каждое помещение вводится наружный воздух, приготовленный в центральном кондиционере. Перед выпуском в помещение он смешивается с воздухом данного помещения, предварительно охлажденным или нагретым в теплообменниках кондиционеров?доводчиков, снабжаемых холодной и горячей водой». Приведенная цитата показывает, что автор хорошо понимает неопределенность предложенного им признака классификации и поэтому сразу поясняет, что он имеет в виду под центральными водовоздушными системами.
Системы без доводчиков могут быть прямоточными, когда в помещение подается обработанный наружный воздух, и с рециркуляцией, когда к наружному воздуху подмешивают воздух, забираемый из помещения. Кроме того, технологические СКВ, обслуживающие помещения или аппараты без пребывания людей, могут работать без подачи наружного воздуха со 100 % рециркуляцией. В зависимости от алгоритма работы СКВ различают системы с постоянной рециркуляцией, в которых соотношение количества наружного и рециркуляционного воздуха во время работы не изменяется, и СКВ с переменной рециркуляцией, в которых количество наружного воздуха может изменяться от 100 % до некоторого нормируемого минимального уровня.
Кроме того, системы с рециркуляцией могут быть одновентиляторными и двухвентиляторными. В первых системах подача приточного воздуха в помещение, а также забор наружного и рециркуляционного воздуха осуществляется приточным вентилятором УКВ. Во втором случае для удаления воздуха из помещения и подачи его на рециркуляцию или на выброс применяют дополнительный вытяжной вентилятор.
Независимо от схемы компоновки и устройства отдельных элементов СКВ подразделяют также по их назначению. Многие авторы делят СКВ на комфортные, технологические и комфортно-технологические. Более удачной и полной представляется классификация СКВ по назначению на эргономической основе, разработанная ВНИИкондиционером [5].
Определено, что СКВ могут выполнять одну из трех функций обслуживания: машин; машин + людей; людей.
1-я группа (символ «машина») определена как технологические СКВ. СКВ этой группы обслуживают технологические аппараты, камеры, боксы, машины и т. п., то есть применяются в тех случаях, когда условия воздушной среды диктуются обеспечением работоспособности технологического оборудования. При этом параметры воздушной среды могут отличаться от тех, которые определяются санитарно-гигиеническими нормами.
1-я группа имеет две модификации:- Подгруппа 1–1 включает в себя кондиционируемые объекты, полностью исключающие возможность пребывания в них человека, то есть это системы технологического охлаждения, обдува электронных блоков вычислительных машин, шахты обдува волокна прядильных машин и т. п.
- Подгруппа 1–2 включает в себя кондиционируемые объекты: технологические аппараты (машины, камеры, боксы) и помещения с особыми параметрами воздушной среды (калориметрического, экологического и другого назначения), в которых человек отсутствует или находится эпизодически (для снятия показаний приборов, изменения режима работы и т. д.).
Если для группы 1–1 отсутствуют какие-либо ограничения по параметрам и составу воздушной среды, то для объектов подгруппы 1–2 газовый состав воздушной среды должен находиться в пределах, установленных ГОСТ.
2-я группа (символ «машина + человек») определена как технологически комфортные СКВ. СКВ этой группы обслуживают производственные помещения, в которых длительно пребывают люди.
2-я группа имеет три модификации:- Подгруппа 2–1. Технологически комфортные СКВ обеспечивают условия нормального осуществления технологических процессов как для производств, в которых затруднено или практически невозможно получение продукции без поддержания определенных параметров воздушной среды, так и для производств, в которых колебания параметров воздуха существенно влияют на качество продукции и величину брака.
- Для этих помещений СКВ устраивается в первую (и основную) очередь по требованиям технологии, однако в связи с наличием в этих помещениях людей, параметры КВ устанавливают с учетом требований санитарно-гигиенических норм.
- Подгруппа 2–2. СКВ создаются для исключения дискомфортных условий труда при тяжелых режимах работы людей (кабины крановщиков мостовых кранов металлургических заводов и ТЭЦ, кабины строительно-дорожных машин и т. д.). Производственные или экономические аспекты для этих установок имеют второстепенное значение.
- Подгруппа 2–3. СКВ обеспечивают в производственных помещениях комфортные условия труда, способствующие повышению производительности труда, улучшению проведения основных технологических режимов, снижению заболеваемости, уменьшению эксплуатационных затрат и т. п.
3-я группа (символ «люди») определена как комфортные СКВ, обеспечивающие санитарно-гигиенические условия труда, отдыха или иного пребывания людей в помещениях гражданских зданий, то есть вне промышленного производства.
Эта группа имеет две модификации:- Подгруппа 3–1. СКВ обслуживают помещения общественных зданий, в которых для одной части людей пребывание в них кратковременно (например, покупатели в универмаге), а для другой – длительно (например, продавцы в этом же универмаге).
- Подгруппа 3–2. СКВ обеспечивают оптимальные условия пребывания людей в жилых помещениях.
В классификацию ВНИИконди-ционера необходимо ввести еще одну группу – медицинские СКВ. Очевидно, что СКВ, обслуживающие операционные, реанимационные или палаты интенсивной терапии, никак нельзя считать комфортными, а чтобы отнести их к технологическим, надо в качестве «машины» рассматривать самого человека, что просто глупо.
Медицинские СКВ должны иметь две подгруппы:- Подгруппа 4–1. СКВ обслуживают операционные, реанимационные и т. п. помещения.
- Подгруппа 4–2. СКВ обеспечивают требуемые параметры воздуха в палатах, кабинетах врачей, процедурных и т. п.
Для завершения классификации СКВ рассмотрим еще несколько признаков.
По типу системы холодоснабжения различают автономные и неавтономные СКВ. В автономных источник холода встроен в кондиционер, в неавтономных – источником холода является отдельный холодильный центр. Кроме того, в автономных кондиционерах в воздухоохладитель может подаваться кипящий хладон или жидкий промежуточный хладоноситель (холодная вода, растворы). Заметим, что на многих объектах мы использовали схему с подачей хладона в воздухоохладитель центрального кондиционера от расположенной рядом холодильной машины или внешнего блока VRV.
По способу компенсации изменяющихся тепловых и (или) влажностных возмущений в обслуживаемом помещении различают СКВ с постоянным расходом воздуха (CAV) – системы, в которых внутренние параметры поддерживают изменяя температуру и влажность приточного воздуха (качественное регулирование), и системы с переменным расходом воздуха (VAV) – системы с количественным регулированием.
По числу воздуховодов для подачи кондиционированного воздуха в помещенияСКВ делятся на одноканальные и двухканальные, при этом приточный воздух в каждом канале имеет разную температуру и влажность, что позволяет, изменяя соотношение приточного воздуха, подаваемого через каждый канал, поддерживать требуемые параметры в обслуживаемом помещении.
По числу точек стабилизации одноименного параметра (t; φ)в большом помещении или группе небольших помещений различают одно- и многозональные СКВ.
–это СКВ с местными доводчиками. В этих СКВ центральная или местная УКВ подает в помещение санитарную норму наружного воздуха, даже не обязательно обработанного, а местные доводчики обеспечивают поддержание в помещении требуемых параметров воздуха (температуры, относительной влажности и подвижности).
Сегодня в качестве местных доводчиков применяют: внутренние блоки сплит-систем или VRV-систем; фэнкойлы (двух- или четырехтрубные); моноблоки (напольные, потолочные или настенные); эжекционные доводчики; местные увлажнители воздуха; охлаждаемые и нагреваемые потолки; охлаждающие балки (пассивные и активированные).
Все указанные доводчики сами по себе не являются кондиционерами, хотя их и называют так продавцы оборудования.
Известно, что некоторые фирмы работают над созданием, например, фэнкойлов или сплит-систем, подающих в помещение наружный воздух. Но, если это и произойдет в массовом масштабе, то ничего страшного с классификацией не случится, просто это оборудование получит статус местных кондиционеров.
Блок-схема рассмотренной классификации СКВ приведена на рис. 2.
Помимо рассмотренных признаков в схему на рис. 2 включен еще один: наличие утилизаторов теплоты и холода, которые могут быть как в центральных, так и в местных СКВ. Причем необходимо различать системы утилизации типа воздух-воздух, к которым относятся схемы с промежуточным теплоносителем, с пластинчатыми теплообменниками* и с регенеративными вращающимися и переключаемыми теплообменниками, а также системы утилизации теплоты оборотной воды и теплоты обратного теплоносителя систем централизованного теплоснабжения и систем технологического жидкостного охлаждения.Литература
- Липа А. И. Кондиционирование воздуха. Основы теории. Совре-менные технологии обработки воздуха. – Одесса: Издательство ВМВ, 2010.
- СНиП 41–01–2003. Отопление, вентиляция, кондиционирование. М.: Госстрой России. – 2004.
- Англо-русский терминологический словарь по отоплению, вентиляции, кондиционированию воздуха и охлаждению. М.: Изд-во «АВОК-ПРЕСС», 2002.
- Кокорин О. Я. Энергосберегаю-щие системы кондиционирования воздуха. ООО «ЛЭС». – М., 2007.
- Кондиционеры. Каталог-спра-воч-ник ЦНИИТЭстроймаш. – М., 1981.
- Рымкевич А. А. Системный анализ оптимизации общеобменной вентиляции и кондиционирования воздуха. Изд. 1. – М.: Стройиздат, 1990.
- Баркалов Б. В., Карпис Е. Е. Кондиционирование воздуха в промышленных, общественных и жилых зданиях. Изд. 2. – М.: Стройиздат, 1982.
- Сотников А. Г. Процессы, аппараты и системы кондиционирования воздуха и вентиляции. Т. 1. ООО «АТ». – С.-Петербург, 2005.
- Стефанов Е. В. Вентиляция и кондиционирование воздуха. – С.-Петербург: Изд-во «АВОК-Северо-Запад», 2005.
[ http://www.abok.ru/for_spec/articles.php?nid=5029]
Тематики
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > система кондиционирования воздуха
18 система кондиционирования воздуха
система кондиционирования воздуха
Совокупность воздухотехнического оборудования, предназначенная для кондиционирования воздуха в помещениях
[ ГОСТ 22270-76]
система кондиционирования воздуха
Совокупность технических средств для обработки и распределения воздуха, а также автоматического регулирования его параметров с дистанционным управлением всеми процессами
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
система кондиционирования воздуха
Комбинация всех компонент, необходимых для обработки воздуха, в процессе которой осуществляется контроль или понижение температуры, возможно, в комбинации с контролем вентиляции, влажности и чистоты воздуха.
[ДИРЕКТИВА 2002/91/ЕС ЕВРОПЕЙСКОГО ПАРЛАМЕТА И СОВЕТА от 16 декабря 2002 г. по энергетическим характеристикам зданий]
КЛАССИФИКАЦИЯ-
По назначению
-
Комфортные
-
Технологические
-
Комфортные
-
По способу охлаждения воздуха
- Непосредственного охлаждения (с непосредственным охлаждением воздуха)
- Косвенного охлаждения (с водяным охлаждением воздуха - чиллеры и фанкойлы)
-
По степени централизации
- Центральные
-
Зональные
- Однозональные
-
Мультизональные (VRF-системы)
- Местные
-
По степени использования наружного воздуха
-
По автономности
-
По способу комплектации
-
По конструктивному оформлению
-
Моноблочные
-
Сплит-системы
-
По конструктивному исполнению внутреннего блока
-
По количеству внутренних блоков
-
По конструктивному исполнению внутреннего блока
-
Моноблочные
-
По размещению конденсатора
-
По способу охлаждения конденсатора
- С воздушным охлаждением конденсатора
- С осевыми вентиляторами
- С радиальными вентиляторами
- С водяным охлаждением конденсатора
- С использованием проточной (водопроводной, бросовой) воды
- С использованием оборотной (из градирни) воды
-
По способу управления компрессором
-
По режиму работы
-
По дополнительной комплектации
-
По месту установки
-
По способу подачи воздуха
- С непосредственной подачей воздуха в кондиционируемое помещение
-
С подачей воздуха через воздуховод (канальные)
Классификация систем кондиционирования воздухаМ. Г. Тарабанов, директор НИЦ «ИНВЕНТ», канд. техн. наук, вице-президент НП «АВОК», лауреат премии НП «АВОК» «Медаль имени И. Ф. Ливчака», «Медаль имени В. Н. Богословского», otvet@abok.ru
Общие положения
Краткий, но достаточно полный обзор истории развития кондиционирования воздуха представлен в работе А. И. Липы [1], поэтому отметим только несколько моментов. Родоначальником техники кондиционирования воздуха в ее современном понимании считается американский инженер Виллис Хэвилэнд Кэрриер (Willis Haviland Carrier), который в 1902 году в Нью-Йорке в Бруклинской типографии применил поверхностный водяной воздухоохладитель с вентилятором для получения летом в помещении температуры +26,5 °C и относительной влажности 55 %. Вода охлаждалась в аммиачной холодильной машине. Зимой для увлажнения внутреннего воздуха до 55 % использовался водяной пар от бойлера.
Термин «кондиционирование воздуха» был предложен в 1906 году Стюартом Уорреном Крамером (Stuart Warren Cramer).
В отечественной практике некоторые авторы применяют термин «кондиционирование микроклимата». Заметим, что этот термин отличается от «кондиционирования воздуха», так как включает в себя дополнительные факторы, не связанные с состоянием воздушной среды в помещении (шум, инсоляция и др.).
К сожалению, несмотря на солидный возраст термин «кондиционирование воздуха» не получил четкого определения в современных отечественных нормативных документах. Для устранения этого пробела сформулируем: «Кондиционирование воздуха – это создание и автоматическое поддержание в обслуживаемом помещении или технологическом объеме требуемых параметров и качества воздуха независимо от внутренних возмущений и внешних воздействий». К параметрам воздуха относятся: температура, относительная влажность или влагосодержание и подвижность. Качество воздуха включает в себя газовый состав, запыленность, запахи, аэроионный состав, т. е. более широкий круг показателей, чем термин «чистота», используемый в [2].
Комплекс оборудования, элементов и устройств, с помощью которых обеспечивается кондиционирование воздуха в обслуживаемых помещениях, называется системой кондиционирования воздуха (СКВ).
Приведенное выше определение системы кондиционирования воздуха по смыслу полностью совпадает с определением ASHRAE: «”air-conditioning system” – комплекс оборудования для одновременной обработки и регулирования температуры, влажности, чистоты воздуха и распределения последнего в соответствии с заданными требованиями» [3].
Общепринятого, устоявшегося мнения, что следует включать в состав СКВ, к сожалению, нет.
Так, например, по мнению О. Я. Кокорина [4] СКВ может включать в себя:- установку кондиционирования воздуха (УКВ), обеспечивающую необходимые кондиции воздушной среды по тепловлажностным качествам, чистоте, газовому составу и наличию запахов;
- средства автоматического регулирования и контроля за приготовлением воздуха нужных кондиций в УКВ, а также для поддержания в обслуживаемом помещении или сооружении постоянства заданных кондиций воздуха;
- устройства для транспортирования и распределения кондиционированного воздуха;
- устройства для транспортирования и удаления загрязненного внутреннего воздуха;
- устройства для глушения шума, вызываемого работой элементов СКВ;
- устройства для приготовления и транспортирования источников энергии, необходимых для работы аппаратов в СКВ.
В зависимости от конкретных условий некоторые составные части СКВ могут отсутствовать.
Однако согласиться с отдельными пунктами предложенного состава СКВ нельзя, так как если следовать логике автора [4], то в состав СКВ должны войти и системы оборотного водоснабжения, водопровода и канализации, ИТП и трансформаторные, которые также необходимы для работы аппаратов в СКВ.
Достаточно полное представление о структуре СКВ дает разработанная во ВНИИкондиционере «Блок-схема системы кондиционирования воздуха» (рис. 1) [5].Включенные в эту блок-схему подсистемы обработки воздуха по своему функциональному назначению делятся на блоки:
- основной обработки и перемещения: Б1.1 – приемный, Б1.8 – очистки, Б1.2 – сухого (первого) подогрева, Б1.3 – охлаждения, Б1.6 – тепловлажностной обработки, Б1.9 – перемещения приточного воздуха;
- дополнительной обработки и перемещения: Б2.1 – утилизации, Б2.2 – предварительного подогрева, Б2.3 – доводки общей (второй подогрев, дополнительное охлаждение), Б2.4 – зональной доводки, Б2.5 – местной доводки (эжекционные доводчики и др.), Б2.7 – шумоглушения, Б2.8 – перемещения рециркуляционного воздуха;
- специальной обработки: Б5.5 – тонкой очистки;
- воздушной сети: Б4.2 – воздухораспределительных устройств, Б4.3 – вытяжных устройств, Б4.5 – воздуховодов;
- автоматизации – арматуры – Б3.1.
Помимо этих блоков в СКВ может входить система холодоснабжения (снабжение электроэнергией и теплом осуществляется, как правило, централизованно). Ее включение в состав СКВ, видимо, относится к автономным кондиционерам (см. далее).
Для определения состава оборудования, входящего в СКВ, и границ раздела целесообразно воспользоваться делением на разделы, которое сложилось в практике проектирования.
В частности, при выполнении проектов кондиционирования воздуха достаточно серьезных объектов обычно выделяют в самостоятельные разделы: теплоснабжение СКВ; холодоснабжение и холодильные центры; электроснабжение; автоматизация; водоснабжение, в том числе оборотное, канализация и дренаж.
Причем по каждому из разделов составляют свою спецификацию, в которую включено оборудование, материалы и арматура, относящиеся к своему конкретному разделу.
Таким образом, в состав СКВ следует включить:- УКВ, предназначенную для очистки и тепловлажностной обработки и получения необходимого качества воздуха и его транспортировки по сети воздуховодов до обслуживаемого помещения или технического объема;
- сеть приточных воздуховодов с воздухораспределителями, клапанами и регулирующими устройствами;
- вытяжной вентилятор и сеть вытяжных и рециркуляционных воздуховодов с сетевым оборудованием;
- сеть фреоновых трубопроводов для сплит-систем и VRV-систем с кабелями связи наружных блоков с внутренними;
- фэнкойлы, эжекционные доводчики, моноблоки, холодные и теплые потолки и балки и др. доводчики для охлаждения и (или) нагревания непосредственно внутреннего воздуха;
- оборудование для утилизации теплоты и холода;
- дополнительные воздушные фильтры, шумоглушители и другие элементы.
И даже систему автоматики, входящую в СКВ как бы по определению, целесообразно выделить отдельно, так как ее проектируют инженеры другой специальности, хотя и по заданию так называемых технологов СКВ.
Границей СКВ и систем теплохолодоснабжения можно считать узлы регулирования, а границей электроснабжения и автоматики – электрические щиты и щиты управления, которые в последнее время очень часто делают совмещенными.Классификация систем кондиционирования воздуха
Проблемам классификации СКВ в большей или меньшей степени уделяли внимание практически все авторы учебников и монографий по кондиционированию воздуха. Вот что написал по этому вопросу известный специалист, доктор техн. наук А. А. Рымкевич [6]: «Анализ иерархической структуры самих СКВ прежде всего требует их классификации и только затем их декомпозиции на подсистемы. …Однако для СКВ, решения которых базируются на учете большого числа данных, разработать такую классификацию всегда сложно. Не случайно в литературе нет единого мнения по данному вопросу, и поэтому многие известные авторы… предложили различные методы классификации».
Предложенная А. А. Рымкеви-чем концепция выбора признаков классификации СКВ сформулирована очень точно, и с ней нельзя не согласиться. Проблема состоит в том, как этой концепцией воспользоваться и какие признаки считать определяющими, а какие вторичными, и как точно сформулировать эти признаки.
В начале восьмидесятых годов прошлого века наиболее полная классификация СКВ была предложена в работе Б. В. Баркалова и Е. Е. Карписа [7].
Основные признаки этой классификации с некоторыми дополнениями использованы и в недавно изданной монографии А. Г. Сотникова [8] и в других работах, однако некоторые формулировки отдельных признаков требуют уточнения и корректировки.
Например, для опытных специалистов не составит труда разделить СКВ на центральные и местные, посмотрим, как признак такого деления сформулирован разными авторами.
Б. В. Баркалов, Е. Е. Карпис пишут [7]: «В зависимости от расположения кондиционеров по отношению к обслуживаемым помеще-ниям СКВ делятся на центральные и местные». А. Г. Сотников [8] считает необходимым дополнить: «Деление на местные и центральные СКВ учитывает как место установки кондиционера, так и группировку помещений по системам», а О. Я. Кокорин уточняет: «По характеру связи с обслуживаемым помещением можно подразделить СКВ на три вида: центральные, местные и центрально-местные. Центральные СКВ характеризуются расположением УКВ в удалении от обслуживаемых объектов и наличием приточных воздуховодов значительной протяженности. Местные СКВ характеризуются расположением УКВ в самом обслуживаемом помещении или в непосредственной близости от него, при отсутствии (или наличии весьма коротких) приточных воздуховодов. Центрально-местные СКВ характеризуются как наличием УКВ в удалении от обслуживаемых объектов, так и местных УКВ, располагаемых в самих помещениях или в непосредственной близости от них».
Трудно понять, что имеется в виду под группировкой помещений по системам и что считается протяженными или весьма короткими воздуховодами. Например, кондиционеры, обслуживающие текстильные цеха на Волжском заводе синтетического волокна, имеют производительность по воздуху до 240 м3/ч и расположены рядом с обслуживаемыми помещениями, то есть непосредственно за стенами, но никто из указанных выше авторов не отнес бы их к местным системам.
Несколько иной признак клас-сификации предложил Е. В. Стефанов [9]: «… по степени централизации – на системы центральные, обслуживающие из одного центра несколько помещений, и местные, устраиваемые для отдельных помещений и располагающиеся, как правило, в самих обслуживаемых помещениях».
К сожалению, и эта формулировка является нечеткой, так как одно большое помещение могут обслуживать несколько центральных кондиционеров, а группу небольших помещений – один местный кондиционер.
Фактически в отечественной практике негласно действовал совсем другой признак классификации: все кондиционеры, выпускавшиеся Харьковским заводом «Кондиционер», кроме шкафных, считались центральными, а все кондиционеры, выпускавшиеся Домодедовским заводом «Кондиционер», кроме горизонтальных производительностью 10 и 20 тыс. м3/ч, – относились к местным.
Конечно, сегодня такое деление выглядит смешным, а между тем в нем был определенный здравый смысл.
Известно, что в местных системах используются готовые агрегаты полной заводской сборки обычно шкафного типа со стандартным набором тепломассообменного оборудования с уже готовыми, заданными заранее техническими характеристиками, поэтому местные УКВ не проектируют, а подбирают для конкретного обслуживаемого помещения или группы небольших однотипных помещений.
Максимальная производительность местных систем по воздуху обычно не превышает 20–30 тыс. м3/ч.
Центральные кондиционеры могут быть также полной заводской сборки или собираются на месте монтажа, причем технические характеристики всех элементов, включая воздушные фильтры, вентиляторы и тепломассообменное оборудование, задаются производителями в очень широких пределах, поэтому такие кондиционеры не подбирают, а проектируют, а затем изготавливают в соответствии с бланком-заказом для конкретного объекта.
Обычно центральные кондиционеры собирают в виде горизонтальных блоков, причем производительность таких кондиционеров по воздуху значительно больше, чем у местных и достигает 100–250 тыс. м3/ч у разных фирм-производителей.
Очевидно, что отмеченные признаки относятся к УКВ, но их можно использовать и для классификации СКВ, например, СКВ с центральной УКВ – центральная СКВ, а с местной УКВ – местная СКВ. Такой подход не исключает полностью признаки, предложенные другими авторами, а дополняет их, исключая некоторые неопределенности, типа протяженности воздуховодов и др.
Для дальнейшей классификации СКВ рассмотрим схему ее функционирования.
На параметры внутреннего воздуха в обслуживаемом помещении или технологическом объеме оказывают воздействие внутренние возмущения, то есть изменяющиеся тепло- и влаговыделения, а также внешние факторы, например, изменение температуры и влагосодержания наружного воздуха, воздействие на остекленный фасад прямой солнечной радиации в разное время суток и др.
Задача СКВ состоит в том, чтобы улавливать и своевременно устранять последствия этих возмущений и воздействий для сохранения параметров внутреннего воздуха в заданных пределах, используя систему автоматического регулирования и необходимый набор оборудования (воздухоохладители, воздухонагреватели, увлажнители и др.), а также источники теплоты и холода.
Поддерживать требуемые параметры внутреннего воздуха можно изменяя параметры или расход приточного воздуха, подаваемого в помещение извне, или с помощью аппаратов, установленных непосредственно в помещении, так называемых доводчиков.
Сегодня в качестве доводчиков используют внутренние блоки сплит-систем и VRV-систем, фэнкойлы, моноблоки, охлаждаемые потолки и балки и другие элементы.
К сожалению, в классификации [7] вместо понятия «доводчики» используется понятие «водовоздушные СКВ», а в классификации [8] дополнительно вводится термин «водо- и фреоновоздушная СКВ». С подобными предложениями нельзя согласиться в принципе, так как их авторы вольно или невольно присваивают сплит-системам или фэнкойлам статус систем кондиционирования воздуха, которыми они не являются и, естественно, не могут входить в классификацию СКВ, поскольку являются всего лишь местными охладителями или нагревателями, то есть не более чем доводчиками.
Справедливости ради отметим, что Б. В. Баркалов начинает описание центральных водовоздушных систем очень точной фразой: «В каждое помещение вводится наружный воздух, приготовленный в центральном кондиционере. Перед выпуском в помещение он смешивается с воздухом данного помещения, предварительно охлажденным или нагретым в теплообменниках кондиционеров?доводчиков, снабжаемых холодной и горячей водой». Приведенная цитата показывает, что автор хорошо понимает неопределенность предложенного им признака классификации и поэтому сразу поясняет, что он имеет в виду под центральными водовоздушными системами.
Системы без доводчиков могут быть прямоточными, когда в помещение подается обработанный наружный воздух, и с рециркуляцией, когда к наружному воздуху подмешивают воздух, забираемый из помещения. Кроме того, технологические СКВ, обслуживающие помещения или аппараты без пребывания людей, могут работать без подачи наружного воздуха со 100 % рециркуляцией. В зависимости от алгоритма работы СКВ различают системы с постоянной рециркуляцией, в которых соотношение количества наружного и рециркуляционного воздуха во время работы не изменяется, и СКВ с переменной рециркуляцией, в которых количество наружного воздуха может изменяться от 100 % до некоторого нормируемого минимального уровня.
Кроме того, системы с рециркуляцией могут быть одновентиляторными и двухвентиляторными. В первых системах подача приточного воздуха в помещение, а также забор наружного и рециркуляционного воздуха осуществляется приточным вентилятором УКВ. Во втором случае для удаления воздуха из помещения и подачи его на рециркуляцию или на выброс применяют дополнительный вытяжной вентилятор.
Независимо от схемы компоновки и устройства отдельных элементов СКВ подразделяют также по их назначению. Многие авторы делят СКВ на комфортные, технологические и комфортно-технологические. Более удачной и полной представляется классификация СКВ по назначению на эргономической основе, разработанная ВНИИкондиционером [5].
Определено, что СКВ могут выполнять одну из трех функций обслуживания: машин; машин + людей; людей.
1-я группа (символ «машина») определена как технологические СКВ. СКВ этой группы обслуживают технологические аппараты, камеры, боксы, машины и т. п., то есть применяются в тех случаях, когда условия воздушной среды диктуются обеспечением работоспособности технологического оборудования. При этом параметры воздушной среды могут отличаться от тех, которые определяются санитарно-гигиеническими нормами.
1-я группа имеет две модификации:- Подгруппа 1–1 включает в себя кондиционируемые объекты, полностью исключающие возможность пребывания в них человека, то есть это системы технологического охлаждения, обдува электронных блоков вычислительных машин, шахты обдува волокна прядильных машин и т. п.
- Подгруппа 1–2 включает в себя кондиционируемые объекты: технологические аппараты (машины, камеры, боксы) и помещения с особыми параметрами воздушной среды (калориметрического, экологического и другого назначения), в которых человек отсутствует или находится эпизодически (для снятия показаний приборов, изменения режима работы и т. д.).
Если для группы 1–1 отсутствуют какие-либо ограничения по параметрам и составу воздушной среды, то для объектов подгруппы 1–2 газовый состав воздушной среды должен находиться в пределах, установленных ГОСТ.
2-я группа (символ «машина + человек») определена как технологически комфортные СКВ. СКВ этой группы обслуживают производственные помещения, в которых длительно пребывают люди.
2-я группа имеет три модификации:- Подгруппа 2–1. Технологически комфортные СКВ обеспечивают условия нормального осуществления технологических процессов как для производств, в которых затруднено или практически невозможно получение продукции без поддержания определенных параметров воздушной среды, так и для производств, в которых колебания параметров воздуха существенно влияют на качество продукции и величину брака.
- Для этих помещений СКВ устраивается в первую (и основную) очередь по требованиям технологии, однако в связи с наличием в этих помещениях людей, параметры КВ устанавливают с учетом требований санитарно-гигиенических норм.
- Подгруппа 2–2. СКВ создаются для исключения дискомфортных условий труда при тяжелых режимах работы людей (кабины крановщиков мостовых кранов металлургических заводов и ТЭЦ, кабины строительно-дорожных машин и т. д.). Производственные или экономические аспекты для этих установок имеют второстепенное значение.
- Подгруппа 2–3. СКВ обеспечивают в производственных помещениях комфортные условия труда, способствующие повышению производительности труда, улучшению проведения основных технологических режимов, снижению заболеваемости, уменьшению эксплуатационных затрат и т. п.
3-я группа (символ «люди») определена как комфортные СКВ, обеспечивающие санитарно-гигиенические условия труда, отдыха или иного пребывания людей в помещениях гражданских зданий, то есть вне промышленного производства.
Эта группа имеет две модификации:- Подгруппа 3–1. СКВ обслуживают помещения общественных зданий, в которых для одной части людей пребывание в них кратковременно (например, покупатели в универмаге), а для другой – длительно (например, продавцы в этом же универмаге).
- Подгруппа 3–2. СКВ обеспечивают оптимальные условия пребывания людей в жилых помещениях.
В классификацию ВНИИконди-ционера необходимо ввести еще одну группу – медицинские СКВ. Очевидно, что СКВ, обслуживающие операционные, реанимационные или палаты интенсивной терапии, никак нельзя считать комфортными, а чтобы отнести их к технологическим, надо в качестве «машины» рассматривать самого человека, что просто глупо.
Медицинские СКВ должны иметь две подгруппы:- Подгруппа 4–1. СКВ обслуживают операционные, реанимационные и т. п. помещения.
- Подгруппа 4–2. СКВ обеспечивают требуемые параметры воздуха в палатах, кабинетах врачей, процедурных и т. п.
Для завершения классификации СКВ рассмотрим еще несколько признаков.
По типу системы холодоснабжения различают автономные и неавтономные СКВ. В автономных источник холода встроен в кондиционер, в неавтономных – источником холода является отдельный холодильный центр. Кроме того, в автономных кондиционерах в воздухоохладитель может подаваться кипящий хладон или жидкий промежуточный хладоноситель (холодная вода, растворы). Заметим, что на многих объектах мы использовали схему с подачей хладона в воздухоохладитель центрального кондиционера от расположенной рядом холодильной машины или внешнего блока VRV.
По способу компенсации изменяющихся тепловых и (или) влажностных возмущений в обслуживаемом помещении различают СКВ с постоянным расходом воздуха (CAV) – системы, в которых внутренние параметры поддерживают изменяя температуру и влажность приточного воздуха (качественное регулирование), и системы с переменным расходом воздуха (VAV) – системы с количественным регулированием.
По числу воздуховодов для подачи кондиционированного воздуха в помещенияСКВ делятся на одноканальные и двухканальные, при этом приточный воздух в каждом канале имеет разную температуру и влажность, что позволяет, изменяя соотношение приточного воздуха, подаваемого через каждый канал, поддерживать требуемые параметры в обслуживаемом помещении.
По числу точек стабилизации одноименного параметра (t; φ)в большом помещении или группе небольших помещений различают одно- и многозональные СКВ.
–это СКВ с местными доводчиками. В этих СКВ центральная или местная УКВ подает в помещение санитарную норму наружного воздуха, даже не обязательно обработанного, а местные доводчики обеспечивают поддержание в помещении требуемых параметров воздуха (температуры, относительной влажности и подвижности).
Сегодня в качестве местных доводчиков применяют: внутренние блоки сплит-систем или VRV-систем; фэнкойлы (двух- или четырехтрубные); моноблоки (напольные, потолочные или настенные); эжекционные доводчики; местные увлажнители воздуха; охлаждаемые и нагреваемые потолки; охлаждающие балки (пассивные и активированные).
Все указанные доводчики сами по себе не являются кондиционерами, хотя их и называют так продавцы оборудования.
Известно, что некоторые фирмы работают над созданием, например, фэнкойлов или сплит-систем, подающих в помещение наружный воздух. Но, если это и произойдет в массовом масштабе, то ничего страшного с классификацией не случится, просто это оборудование получит статус местных кондиционеров.
Блок-схема рассмотренной классификации СКВ приведена на рис. 2.
Помимо рассмотренных признаков в схему на рис. 2 включен еще один: наличие утилизаторов теплоты и холода, которые могут быть как в центральных, так и в местных СКВ. Причем необходимо различать системы утилизации типа воздух-воздух, к которым относятся схемы с промежуточным теплоносителем, с пластинчатыми теплообменниками* и с регенеративными вращающимися и переключаемыми теплообменниками, а также системы утилизации теплоты оборотной воды и теплоты обратного теплоносителя систем централизованного теплоснабжения и систем технологического жидкостного охлаждения.Литература
- Липа А. И. Кондиционирование воздуха. Основы теории. Совре-менные технологии обработки воздуха. – Одесса: Издательство ВМВ, 2010.
- СНиП 41–01–2003. Отопление, вентиляция, кондиционирование. М.: Госстрой России. – 2004.
- Англо-русский терминологический словарь по отоплению, вентиляции, кондиционированию воздуха и охлаждению. М.: Изд-во «АВОК-ПРЕСС», 2002.
- Кокорин О. Я. Энергосберегаю-щие системы кондиционирования воздуха. ООО «ЛЭС». – М., 2007.
- Кондиционеры. Каталог-спра-воч-ник ЦНИИТЭстроймаш. – М., 1981.
- Рымкевич А. А. Системный анализ оптимизации общеобменной вентиляции и кондиционирования воздуха. Изд. 1. – М.: Стройиздат, 1990.
- Баркалов Б. В., Карпис Е. Е. Кондиционирование воздуха в промышленных, общественных и жилых зданиях. Изд. 2. – М.: Стройиздат, 1982.
- Сотников А. Г. Процессы, аппараты и системы кондиционирования воздуха и вентиляции. Т. 1. ООО «АТ». – С.-Петербург, 2005.
- Стефанов Е. В. Вентиляция и кондиционирование воздуха. – С.-Петербург: Изд-во «АВОК-Северо-Запад», 2005.
[ http://www.abok.ru/for_spec/articles.php?nid=5029]
Тематики
EN
DE
FR
Русско-французский словарь нормативно-технической терминологии > система кондиционирования воздуха
19 почтовый ящик
( в системе электронной почты) mail box, (средство обмена информацией в электронной почте - файл или каталог, куда помещаются пришедшие сообщения, предназначенные для конкретного пользователя) mailbox, (объекты ядра в Windows, с помощью которого приложения могут обмениваться данными с процессами, исполняемыми на других машинах сети) mailslotРусско-английский словарь по вычислительной технике и программированию > почтовый ящик
20 биолюминесценция
видимое свечение организмов, в том числе микроорганизмов, связанное с процессами их жизнедеятельности; разновидность биохемилюминесценции (см. биохемилюминесценция). Описано более 30 различных систем Б. у бактерий, грибов, червей, ракообразных, насекомых и рыб. Б. осуществляется в результате окисления люциферинов (см. люциферины) с помощью фермента люциферазы. Переход окисленной формы люциферинов из возбужденного состояния в основное сопровождается испусканием кванта света.Толковый биотехнологический словарь. Русско-английский. > биолюминесценция
Страницы- 1
- 2
См. также в других словарях:
ГОСТ 25804.1-83: Аппаратура, приборы, устройства и оборудование систем управления технологическими процессами атомных электростанций. Основные положения — Терминология ГОСТ 25804.1 83: Аппаратура, приборы, устройства и оборудование систем управления технологическими процессами атомных электростанций. Основные положения оригинал документа: Аппаратура вида I Аппаратура, имеющая два уровня качества… … Словарь-справочник терминов нормативно-технической документации
расчет затрат, связанных с бизнес-процессами — 3.4.6. расчет затрат, связанных с бизнес процессами : Определение с помощью специального программного средства суммарных издержек, связанных с БПроводится посредством последовательного суммирования издержек, связанных с отдельными функциями по… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 51814.3-2001: Системы качества в автомобилестроении. Методы статистического управления процессами — Терминология ГОСТ Р 51814.3 2001: Системы качества в автомобилестроении. Методы статистического управления процессами оригинал документа: 3.1. анализ зон: Метод детального анализа контрольных карт Шухарта, использующий деление полосы между… … Словарь-справочник терминов нормативно-технической документации
СТО 17330282.27.140.009-2008: Автоматизированные системы управления технологическими процессами ГЭС и ГАЭС. Организация эксплуатации и технического обслуживания. Нормы и требования — Терминология СТО 17330282.27.140.009 2008: Автоматизированные системы управления технологическими процессами ГЭС и ГАЭС. Организация эксплуатации и технического обслуживания. Нормы и требования: 3.1 автоматизированная система (АС): Система,… … Словарь-справочник терминов нормативно-технической документации
Утилиты управления процессами — Это статья об утилитах управления процессами. О встроенной утилите Microsoft Windows см. статью Диспетчер задач Microsoft Windows Диспетчер задач компьютерная программа (утилита) для вывода на экран списка запущенных процессов и потребляемых ими … Википедия
автоматизированное с помощью ЭВМ производство — Например, комплексное использование ПЭВМ для управления технологическими и другими процессами в различных видах производств; является естественным продолжением САПР. [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ.… … Справочник технического переводчика
РЕЧЬ — в акустике, последовательность звуков речи, произносимых, как правило, слитно, с паузами только после отд. слов или групп звуков. Слитность произношения звуков Р., вследствие непрерывности движений артикуляц. органов Р., вызывает взаимное влияние … Физическая энциклопедия
Речь — I речевая деятельность, общение, опосредствованное Языком, один из видов коммуникативной (см. Коммуникация) деятельности человека. Р. возникла в коллективе как средство координации совместной трудовой деятельности и как одна из форм… … Большая советская энциклопедия
Речь — I речевая деятельность, общение, опосредствованное Языком, один из видов коммуникативной (см. Коммуникация) деятельности человека. Р. возникла в коллективе как средство координации совместной трудовой деятельности и как одна из форм… … Большая советская энциклопедия
Денисов, Анатолий Алексеевич — Стиль этой статьи неэнциклопедичен или нарушает нормы русского языка. Статью следует исправить согласно стилистическим правилам Википедии … Википедия
Тарифное регулирование — фискальный способ управления экономическими процессами с помощью налогов. По английски: Tariff regulation См. также: Налоговая политика Финансовый словарь Финам … Финансовый словарь
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский